

Ball Lens Fiber Optic Sensor based Smart Handheld Microsurgical Instrument
- PMID: 24224076
- PMCID: PMC3820282
- DOI: 10.1117/12.2004947
Ball Lens Fiber Optic Sensor based Smart Handheld Microsurgical Instrument
Abstract
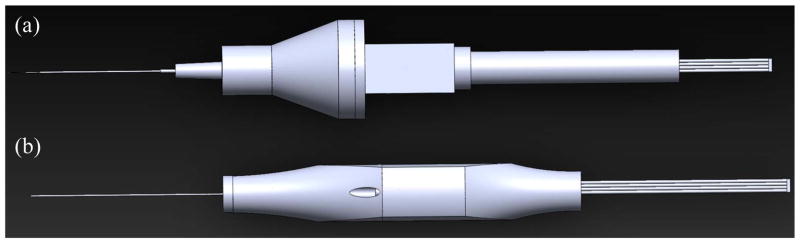
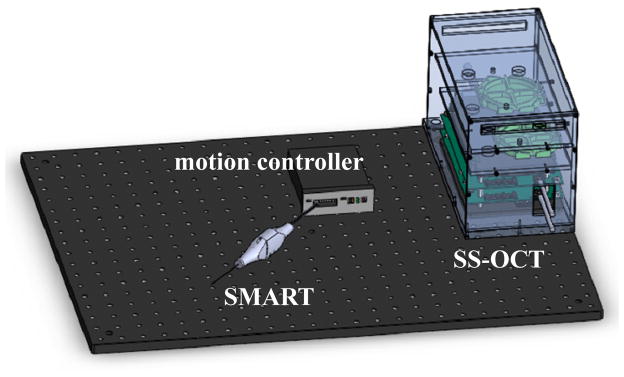
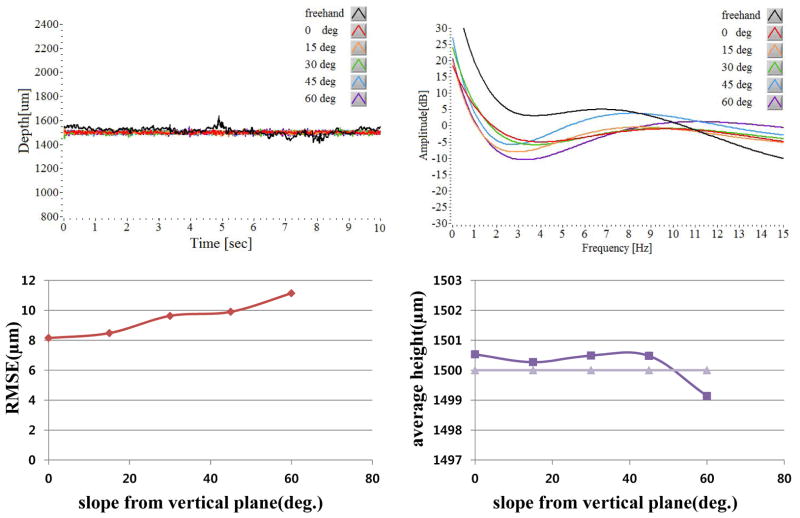
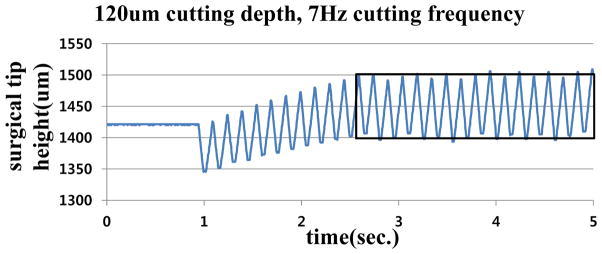
During freehand performance of vitreoretinal microsurgery the surgeon must perform precise and stable maneuvers that achieve surgical objectives and avoid surgical risk. Here, we present an improved smart handheld microsurgical tool which is based on a ball lens fiber optic sensor that utilizes common path swept source optical coherence tomography. Improvements include incorporation of a ball lens single mode fiber optic probe that increases the working angle of the tool to greater than 45 degrees; and increases the magnitude of the distance sensing signal through water. Also presented is a cutting function with an improved ergonomic design.
Keywords: CP-OCT; SMART; ball lens; handheld surgical instrument; vitreoretinal microsurgery.
Figures
Similar articles
-
Development and preliminary results of bimanual smart micro-surgical system using a ball-lens coupled OCT distance sensor.Biomed Opt Express. 2016 Oct 31;7(11):4816-4826. doi: 10.1364/BOE.7.004816. eCollection 2016 Nov 1. Biomed Opt Express. 2016. PMID: 27896018 Free PMC article.
-
Active tremor cancellation by a "smart" handheld vitreoretinal microsurgical tool using swept source optical coherence tomography.Opt Express. 2012 Oct 8;20(21):23414-21. doi: 10.1364/OE.20.023414. Opt Express. 2012. PMID: 23188305 Free PMC article.
-
Swept source optical coherence tomography based smart handheld vitreoretinal microsurgical tool for tremor suppression.Annu Int Conf IEEE Eng Med Biol Soc. 2012;2012:1405-8. doi: 10.1109/EMBC.2012.6346202. Annu Int Conf IEEE Eng Med Biol Soc. 2012. PMID: 23366163 Free PMC article.
-
Fiber-optic OCT sensor guided "SMART" micro-forceps for microsurgery.Biomed Opt Express. 2013 Jun 4;4(7):1045-50. doi: 10.1364/BOE.4.001045. Print 2013 Jul 1. Biomed Opt Express. 2013. PMID: 23847730 Free PMC article.
-
The value of intraoperative optical coherence tomography imaging in vitreoretinal surgery.Curr Opin Ophthalmol. 2014 May;25(3):221-7. doi: 10.1097/ICU.0000000000000044. Curr Opin Ophthalmol. 2014. PMID: 24614147 Free PMC article. Review.
Cited by
-
Development and preliminary results of bimanual smart micro-surgical system using a ball-lens coupled OCT distance sensor.Biomed Opt Express. 2016 Oct 31;7(11):4816-4826. doi: 10.1364/BOE.7.004816. eCollection 2016 Nov 1. Biomed Opt Express. 2016. PMID: 27896018 Free PMC article.
-
Preliminary Design and Evaluation of a B-Scan OCT-Guided Needle.Photonics. 2014 Sep;1(3):260-266. doi: 10.3390/photonics1030260. Photonics. 2014. PMID: 26038771 Free PMC article.
-
Robot-assisted vitreoretinal surgery: current perspectives.Robot Surg. 2018;5:1-11. doi: 10.2147/RSRR.S122301. Epub 2018 Feb 23. Robot Surg. 2018. PMID: 29527537 Free PMC article.
References
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Miscellaneous