

Volumetric quantification of fluid flow reveals fish's use of hydrodynamic stealth to capture evasive prey
- PMID: 24227312
- PMCID: PMC3836328
- DOI: 10.1098/rsif.2013.0880
Volumetric quantification of fluid flow reveals fish's use of hydrodynamic stealth to capture evasive prey
Abstract
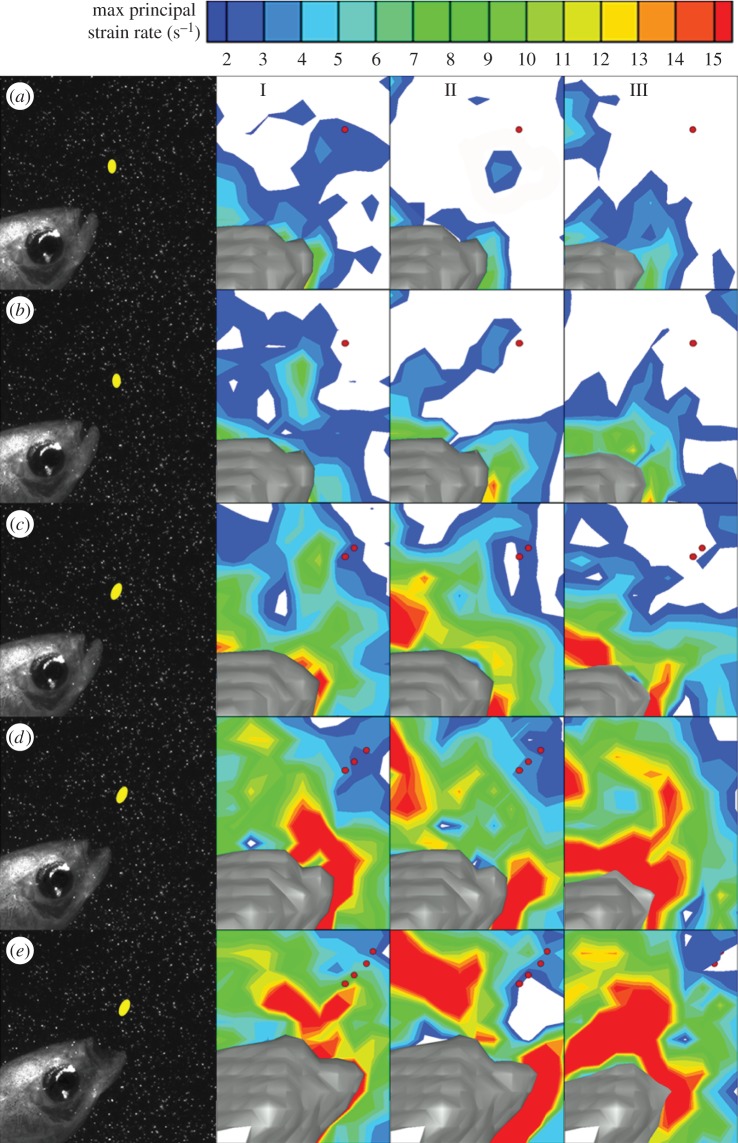
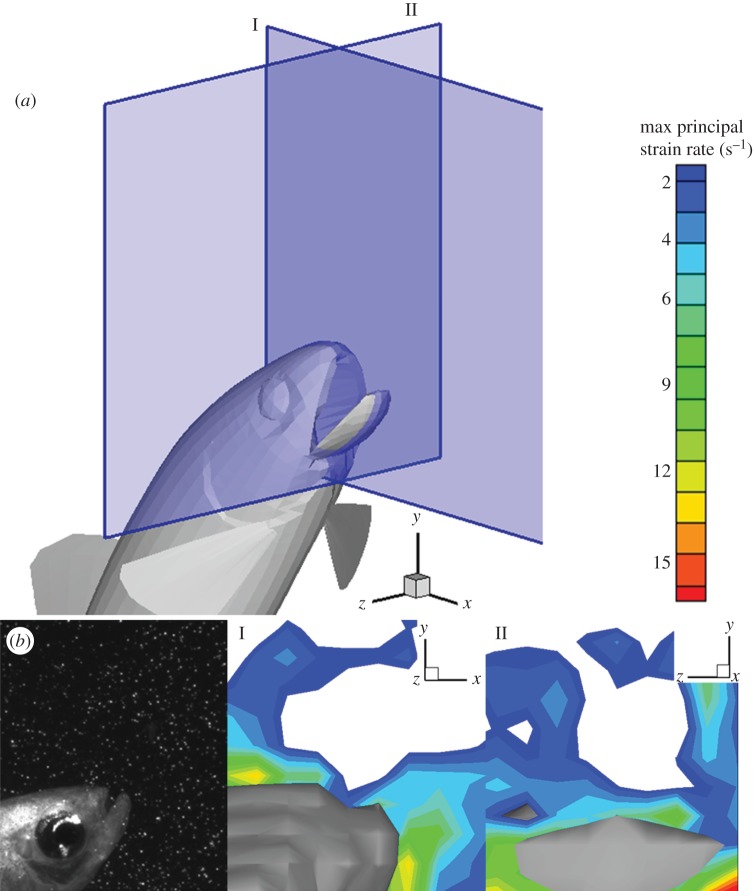
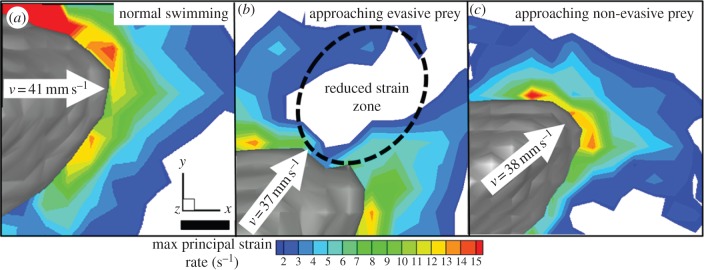
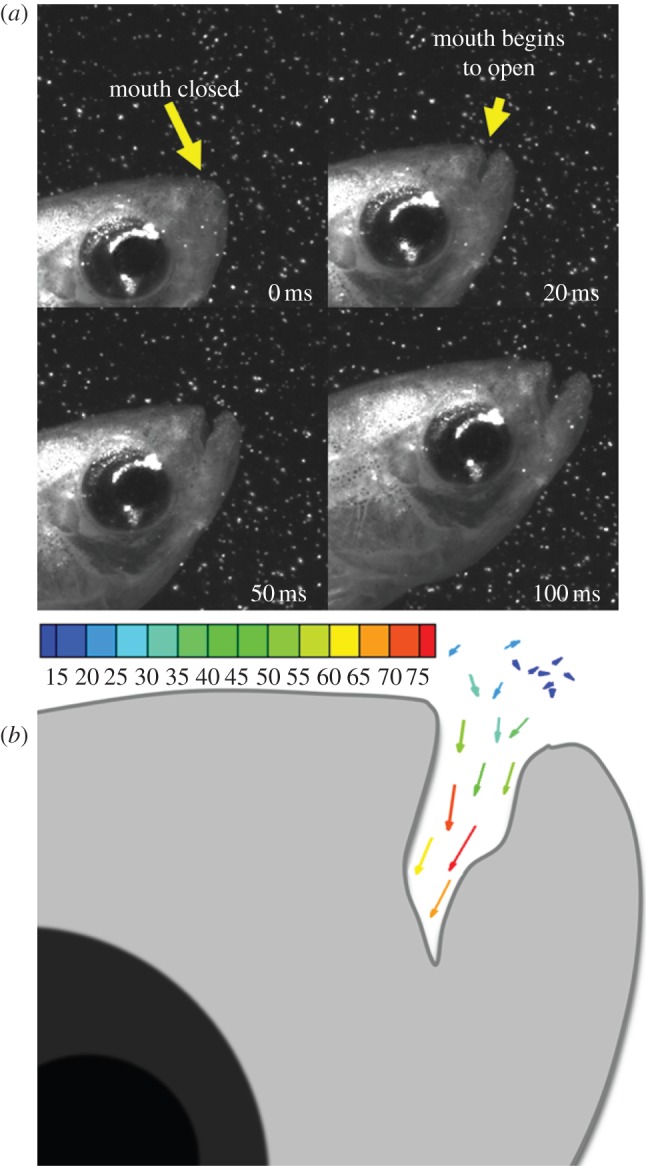
In aquatic ecosystems, predation on zooplankton by fish provides a major pathway for the transfer of energy to higher trophic levels. Copepods are an abundant zooplankton group that sense hydromechanical disturbances produced by approaching predators and respond with rapid escapes. Despite this capability, fish capture copepods with high success. Previous studies have focused on the predatory strike to elucidate details of this interaction. However, these raptorial strikes and resulting suction are only effective at short range. Thus, small fish must closely approach highly sensitive prey without triggering an escape in order for a strike to be successful. We use a new method, high-speed, infrared, tomographic particle image velocimetry, to investigate three-dimensional fluid patterns around predator and prey during approaches. Our results show that at least one planktivorous fish (Danio rerio) can control the bow wave in front of the head during the approach and consumption of prey (copepod). This alters hydrodynamic profiles at the location of the copepod such that it is below the threshold required to elicit an escape response. We find this behaviour to be mediated by the generation of suction within the buccopharyngeal cavity, where the velocity into the mouth roughly matches the forward speed of the fish. These results provide insight into how animals modulate aspects of fluid motion around their bodies to overcome escape responses and enhance prey capture.
Keywords: animal–fluid interaction; hydrodynamic signals; predation; stealth predation; strain rate; tomography.
Figures
References
-
- Turner AM, Mittelbach GG. 1990. Predator avoidance and community structure: interactions among piscivores, planktivores, and plankton. Ecology 71, 2241–2254. ( 10.2307/1938636) - DOI
-
- Kerfoot WC, Sih A. 1987. Predation: direct and indirect impacts on aquatic communities. Hanover, NH: University Press of New England.
-
- Aksnes DL, Nejstgaard J, Sœdberg E, Sørnes T. 2004. Optical control of fish and zooplankton populations. Limnol. Oceanogr. 49, 233–238. ( 10.4319/lo.2004.49.1.0233) - DOI
-
- O'brien W. 1987. Planktivory by freshwater fish: thrust and parry in the pelagia. In Predation: direct and indirect impacts on aquatic communities (eds Kerfoot C, Sih A.), pp. 3–16. Hanover, NH: University Press of New England.
-
- Kiorboe T, Visser AW. 1999. Predator and prey perception in copepods due to hydromechanical signals. Mar. Ecol. Prog. Ser. 179, 81–95. ( 10.3354/meps179081) - DOI
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources