

25th anniversary article: A soft future: from robots and sensor skin to energy harvesters
- PMID: 24307641
- PMCID: PMC4240516
- DOI: 10.1002/adma.201303349
25th anniversary article: A soft future: from robots and sensor skin to energy harvesters
Abstract
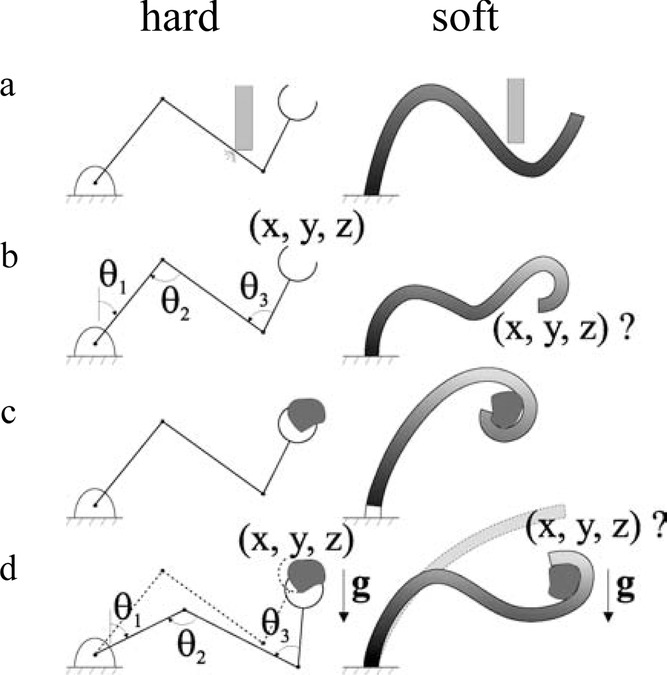
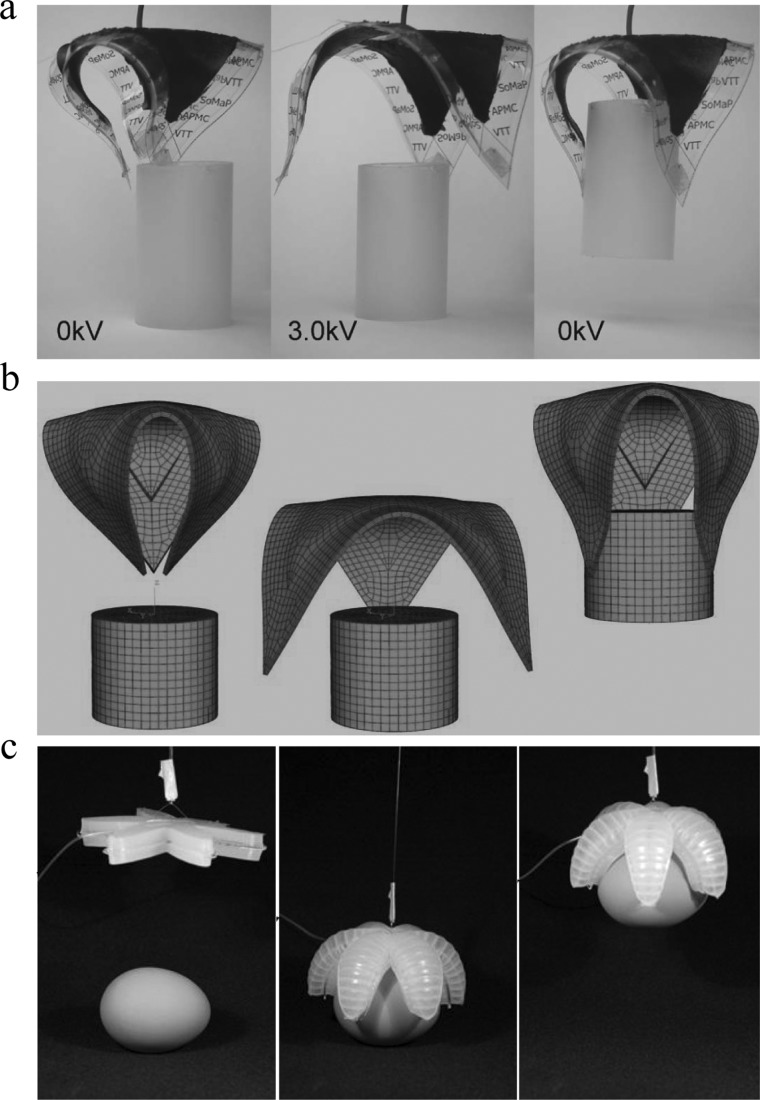
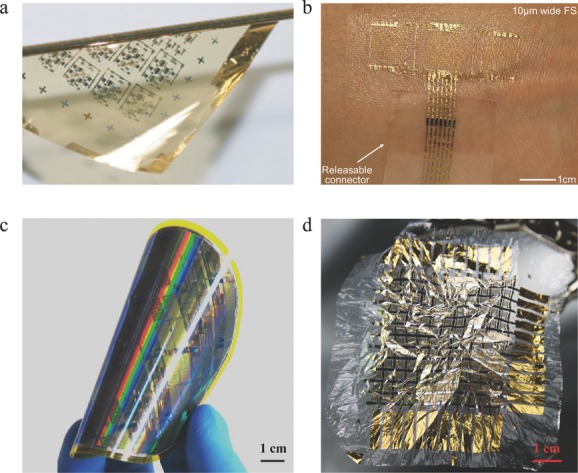
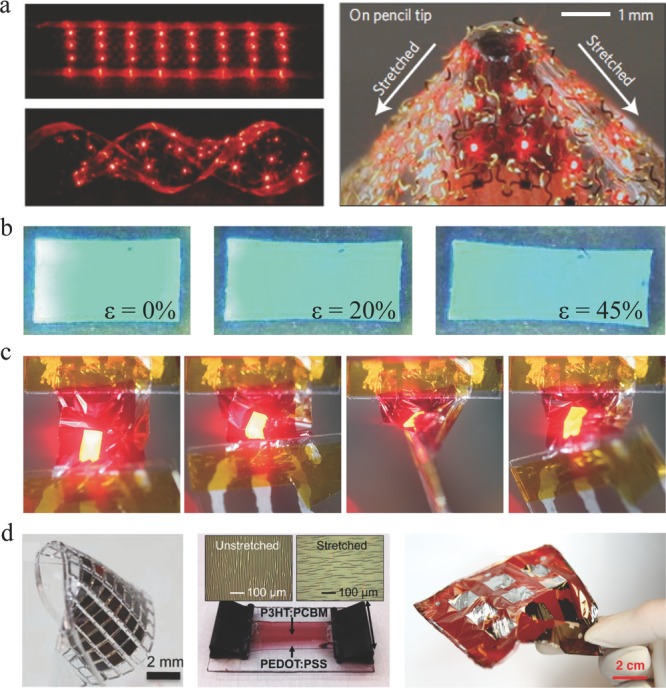
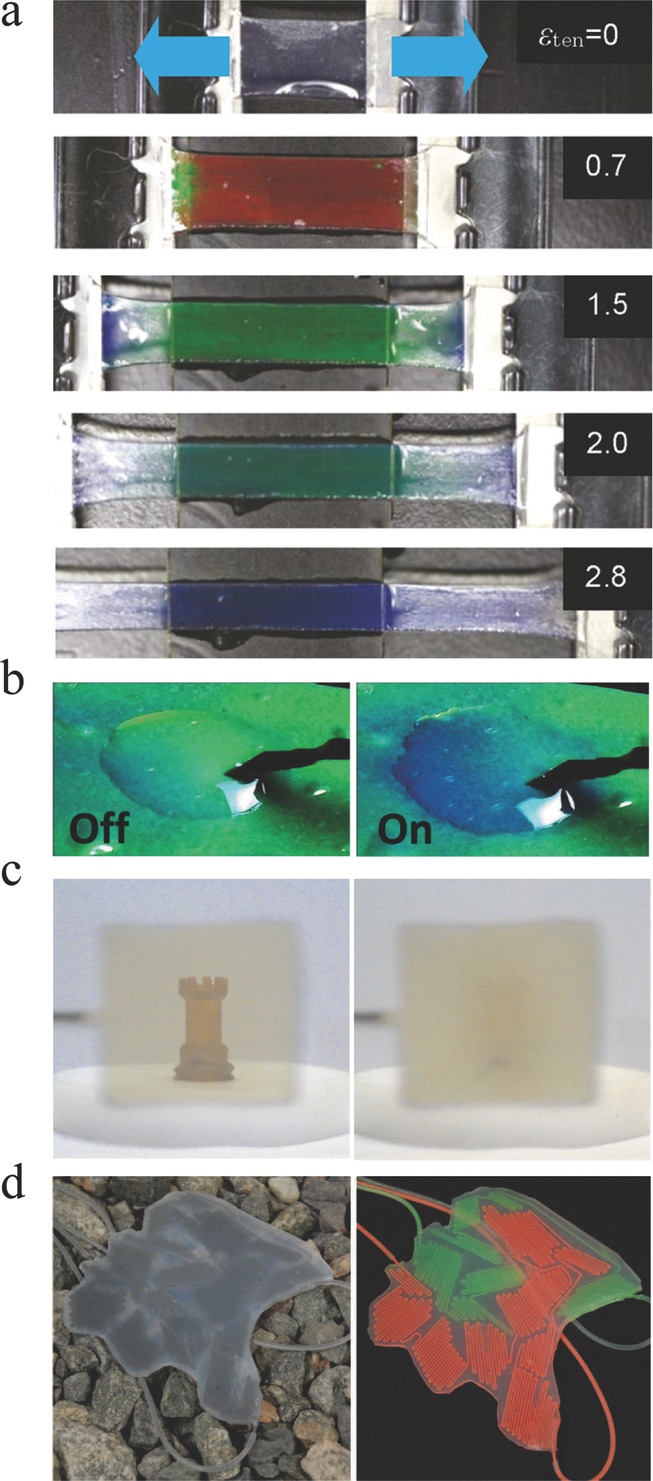
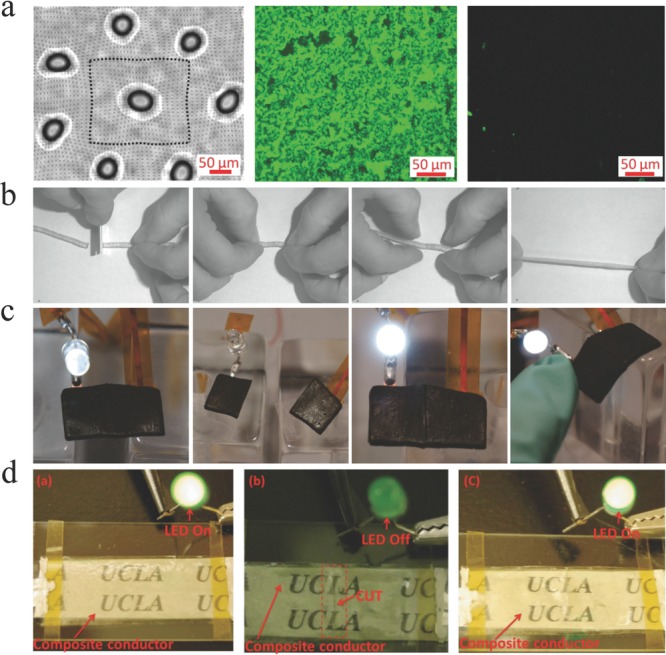
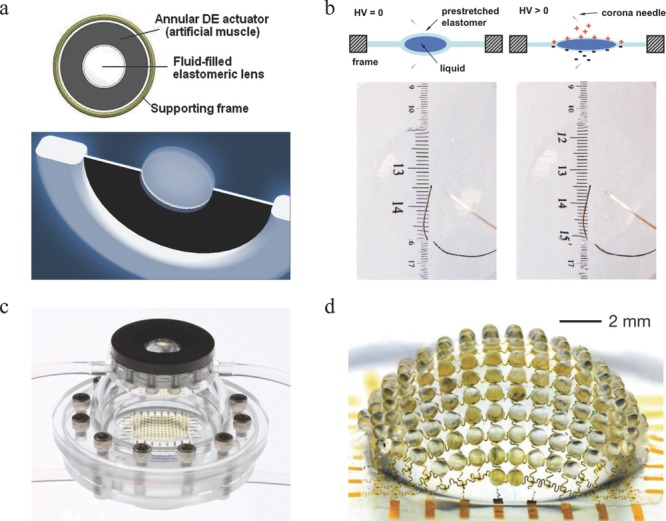
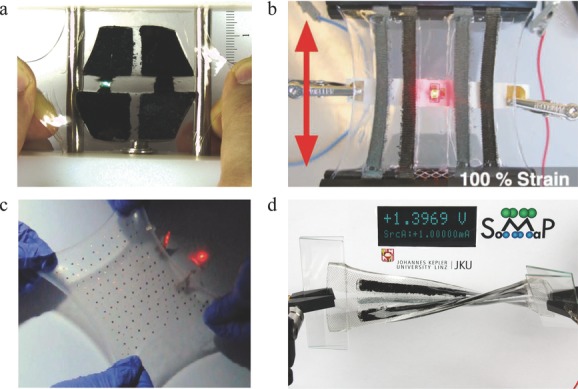
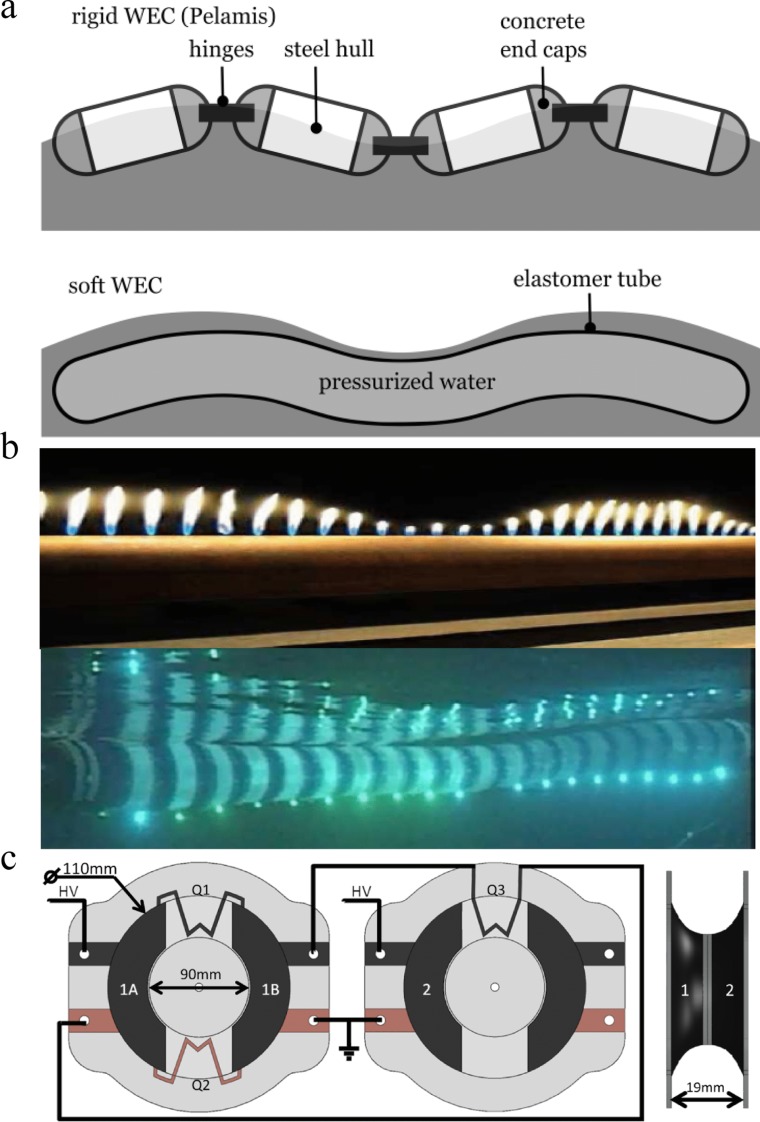
Scientists are exploring elastic and soft forms of robots, electronic skin and energy harvesters, dreaming to mimic nature and to enable novel applications in wide fields, from consumer and mobile appliances to biomedical systems, sports and healthcare. All conceivable classes of materials with a wide range of mechanical, physical and chemical properties are employed, from liquids and gels to organic and inorganic solids. Functionalities never seen before are achieved. In this review we discuss soft robots which allow actuation with several degrees of freedom. We show that different actuation mechanisms lead to similar actuators, capable of complex and smooth movements in 3d space. We introduce latest research examples in sensor skin development and discuss ultraflexible electronic circuits, light emitting diodes and solar cells as examples. Additional functionalities of sensor skin, such as visual sensors inspired by animal eyes, camouflage, self-cleaning and healing and on-skin energy storage and generation are briefly reviewed. Finally, we discuss a paradigm change in energy harvesting, away from hard energy generators to soft ones based on dielectric elastomers. Such systems are shown to work with high energy of conversion, making them potentially interesting for harvesting mechanical energy from human gait, winds and ocean waves.
Keywords: artificial eyes; camouflage; self-healing and -cleaning; soft robots and energy generators; ultrathin electronics.
© 2013 The Authors. Published by WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim.
Figures
References
-
- Lenarcic J, Bajd T, Stanisic MM. Robot Mechanisms. Heidelberg, New York, London: Springer; 2013. , chapters 9 and 10.
-
- Tobin DJ. Chem. Soc. Rev. 2006;35:52. - PubMed
-
- Dahiya RS, Valle M, Sandini G. IEEE Trans. Robotics. 2010;26
-
- Trivedi D, Rahn CD, Kier WM, Walker ID. Appl. Bion. Biomech. 2008;5:99.
-
- Pfeifer R, Lungarella M, Iida F. Commun. ACM. 2012;55
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
