

Algorithms for a closed-loop artificial pancreas: the case for model predictive control
- PMID: 24351190
- PMCID: PMC3876342
- DOI: 10.1177/193229681300700624
Algorithms for a closed-loop artificial pancreas: the case for model predictive control
Abstract
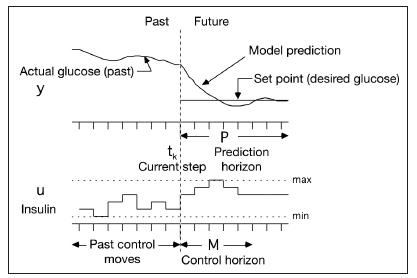
The relative merits of model predictive control (MPC) and proportional-integral-derivative (PID) control are discussed, with the end goal of a closed-loop artificial pancreas (AP). It is stressed that neither MPC nor PID are single algorithms, but rather are approaches or strategies that may be implemented very differently by different engineers. The primary advantages to MPC are that (i) constraints on the insulin delivery rate (and/or insulin on board) can be explicitly included in the control calculation; (ii) it is a general framework that makes it relatively easy to include the effect of meals, exercise, and other events that are a function of the time of day; and (iii) it is flexible enough to include many different objectives, from set-point tracking (target) to zone (control to range). In the end, however, it is recognized that the control algorithm, while important, represents only a portion of the effort required to develop a closed-loop AP. Thus, any number of algorithms/approaches can be successful--the engineers involved in the design must have experience with the particular technique, including the important experience of implementing the algorithm in human studies and not simply through simulation studies.
© 2013 Diabetes Technology Society.
Figures
Comment in
-
Ongoing Debate About Models for Artificial Pancreas Systems and In Silico Studies.Diabetes Technol Ther. 2018 Mar;20(3):174-176. doi: 10.1089/dia.2018.0038. Diabetes Technol Ther. 2018. PMID: 29565720 Free PMC article. No abstract available.
Comment on
-
Algorithms for a closed-loop artificial pancreas: the case for proportional-integral-derivative control.J Diabetes Sci Technol. 2013 Nov 1;7(6):1621-31. doi: 10.1177/193229681300700623. J Diabetes Sci Technol. 2013. PMID: 24351189 Free PMC article.
References
-
- Foss AS. Critique of chemical process control theory. AIChE J. 1973;19(2):209–214.
-
- Cutler CR, Ramaker BL. Dynamic matrix control: a computer control algorithm. Proceedings of the Joint Automatic Control Conference; San Francisco, CA. 1980. paper WP5-B.
-
- Garcia CE, Morari M. Internal model control. A unifying review and some new results. Ind Eng Chem Proc Des Dev. 1982;21(2):308–323.
-
- Ricker NL. Use of quadratic programming for constrained internal model control. Ind Eng Chem Proc Des Dev. 1985;24(4):925–936.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
