

Neural dynamics of reaching following incorrect or absent motor preparation
- PMID: 24462104
- PMCID: PMC3936035
- DOI: 10.1016/j.neuron.2013.11.003
Neural dynamics of reaching following incorrect or absent motor preparation
Abstract
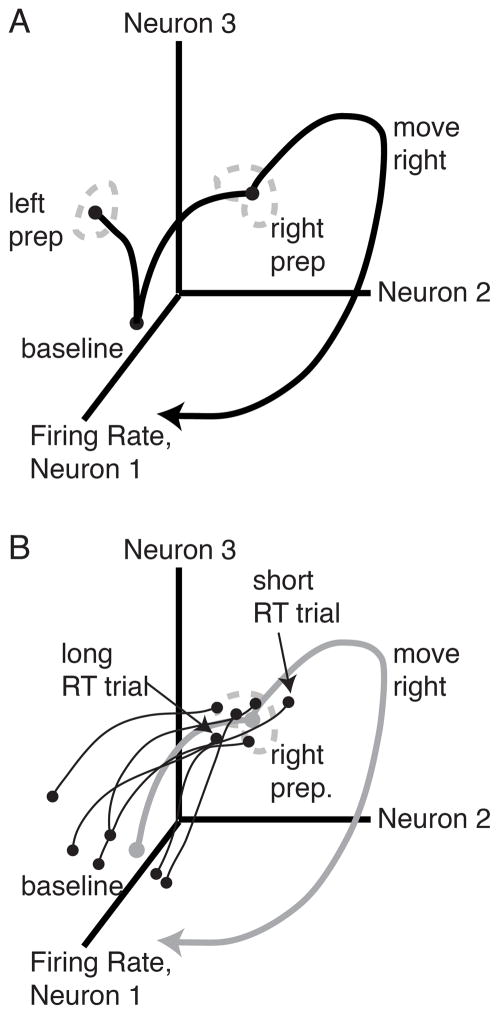
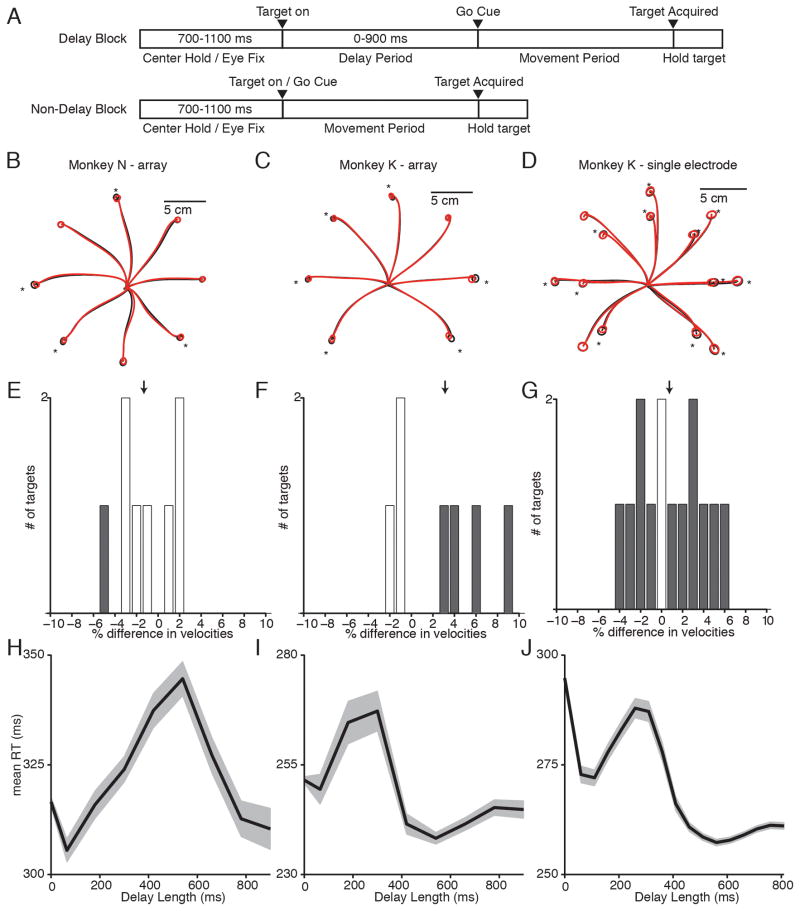
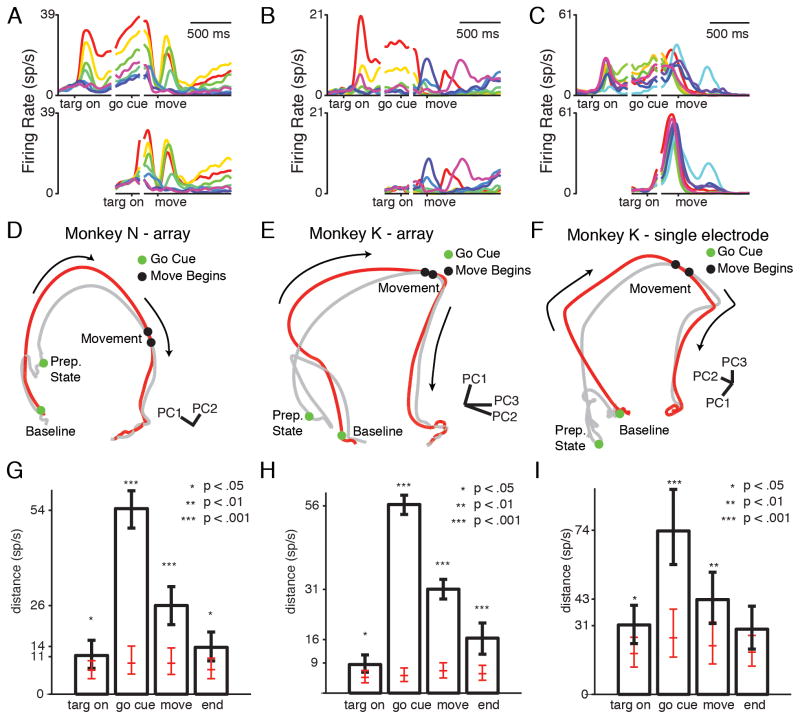
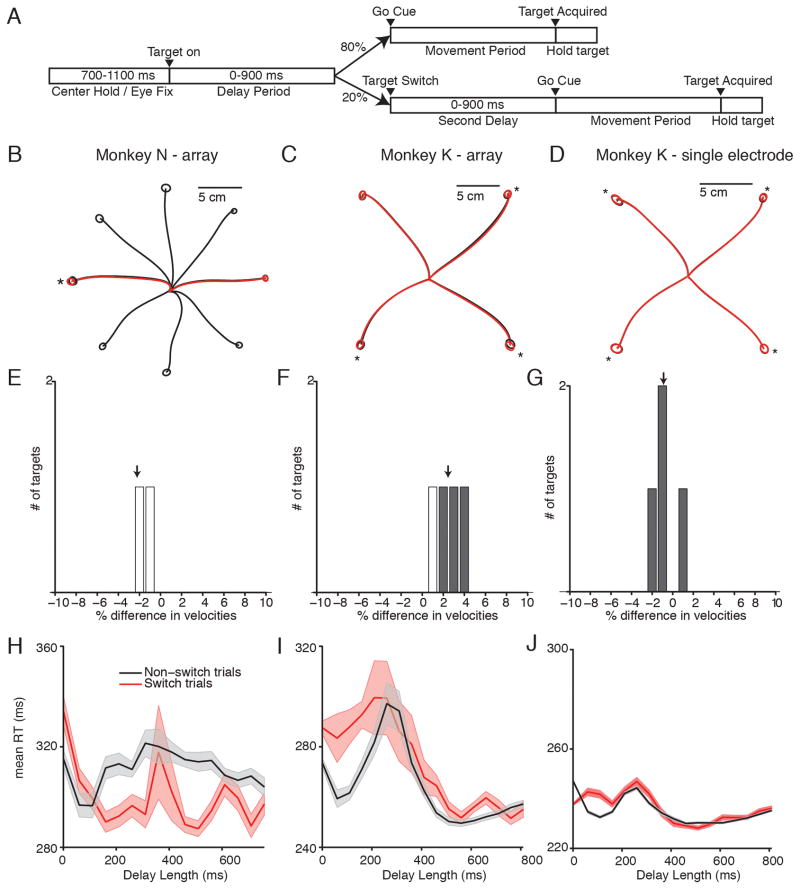
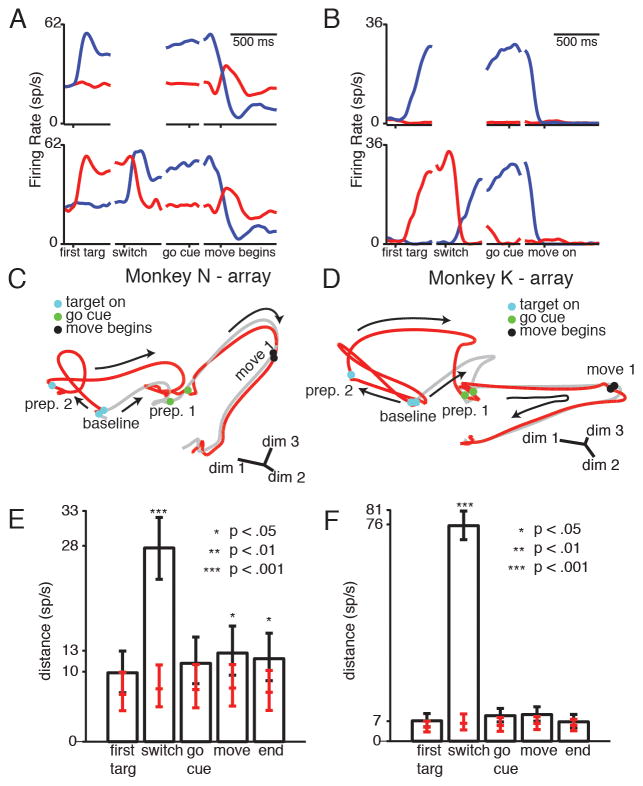
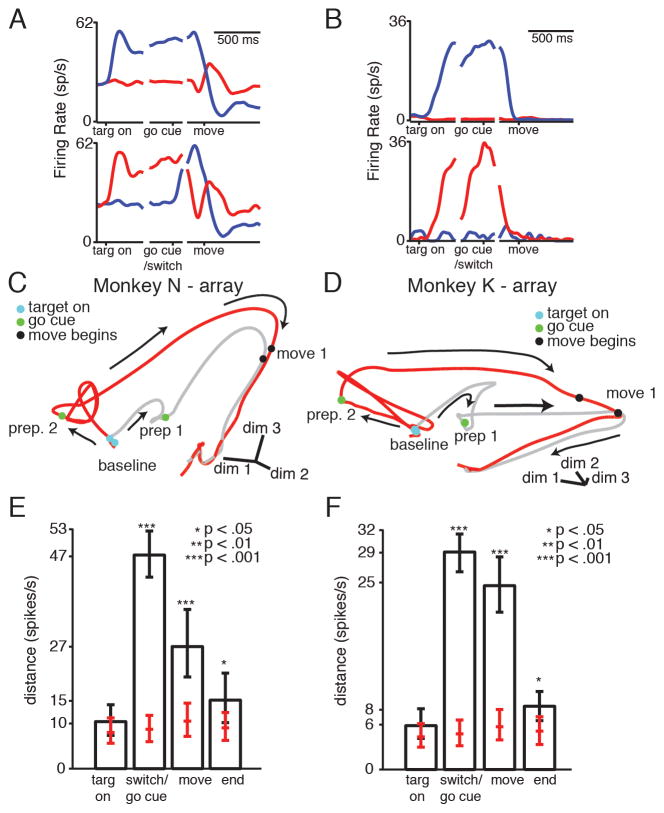
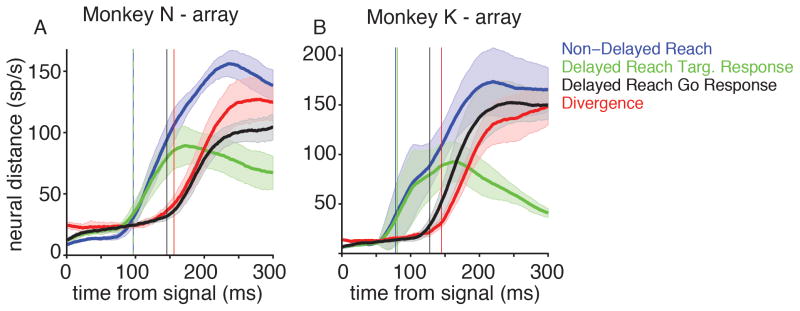
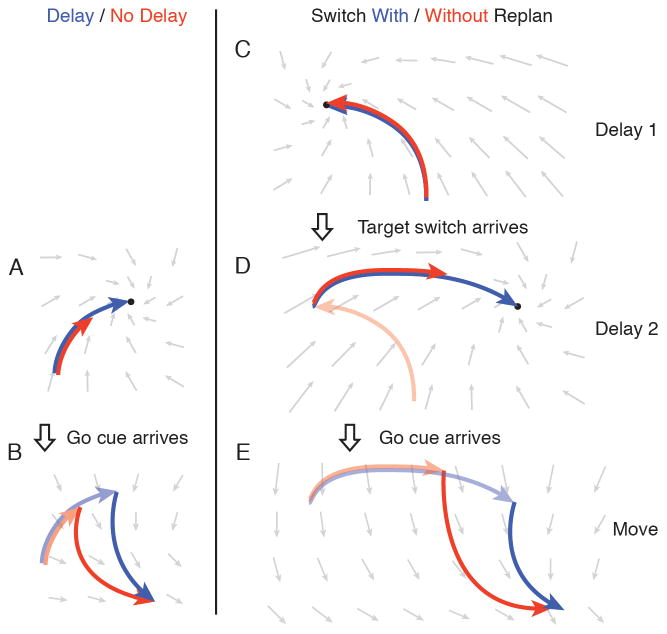
Moving is thought to take separate preparation and execution steps. During preparation, neural activity in primary motor and dorsal premotor cortices achieves a state specific to an upcoming action but movements are not performed until the execution phase. We investigated whether this preparatory state (more precisely, prepare-and-hold state) is required for movement execution using two complementary experiments. We compared monkeys' neural activity during delayed and nondelayed reaches and in a delayed reaching task in which the target switched locations on a small percentage of trials. Neural population activity bypassed the prepare-and-hold state both in the absence of a delay and if the wrong reach was prepared. However, the initial neural response to the target was similar across behavioral conditions. This suggests that the prepare-and-hold state can be bypassed if needed, but there is a short-latency preparatory step that is performed prior to movement even without a delay.
Copyright © 2014 Elsevier Inc. All rights reserved.
Figures
References
-
- Broome BM, Jayaraman V, Laurent G. Encoding and Decoding of Overlapping Odor Sequences. Neuron. 2006;51(4):467–482. - PubMed
-
- Bruce CJ, Goldberg ME. Primate frontal eye fields. I Single neurons discharging before saccades. J Neurophysiol. 1985;53:603–635. - PubMed
-
- Churchland MM, Shenoy KV. Delay of movement caused by disruption of cortical preparatory activity. J Neurophysiol. 2007;97(1):348–359. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
