

Factors affecting grip force: anatomy, mechanics, and referent configurations
- PMID: 24477762
- PMCID: PMC4013148
- DOI: 10.1007/s00221-014-3838-8
Factors affecting grip force: anatomy, mechanics, and referent configurations
Abstract
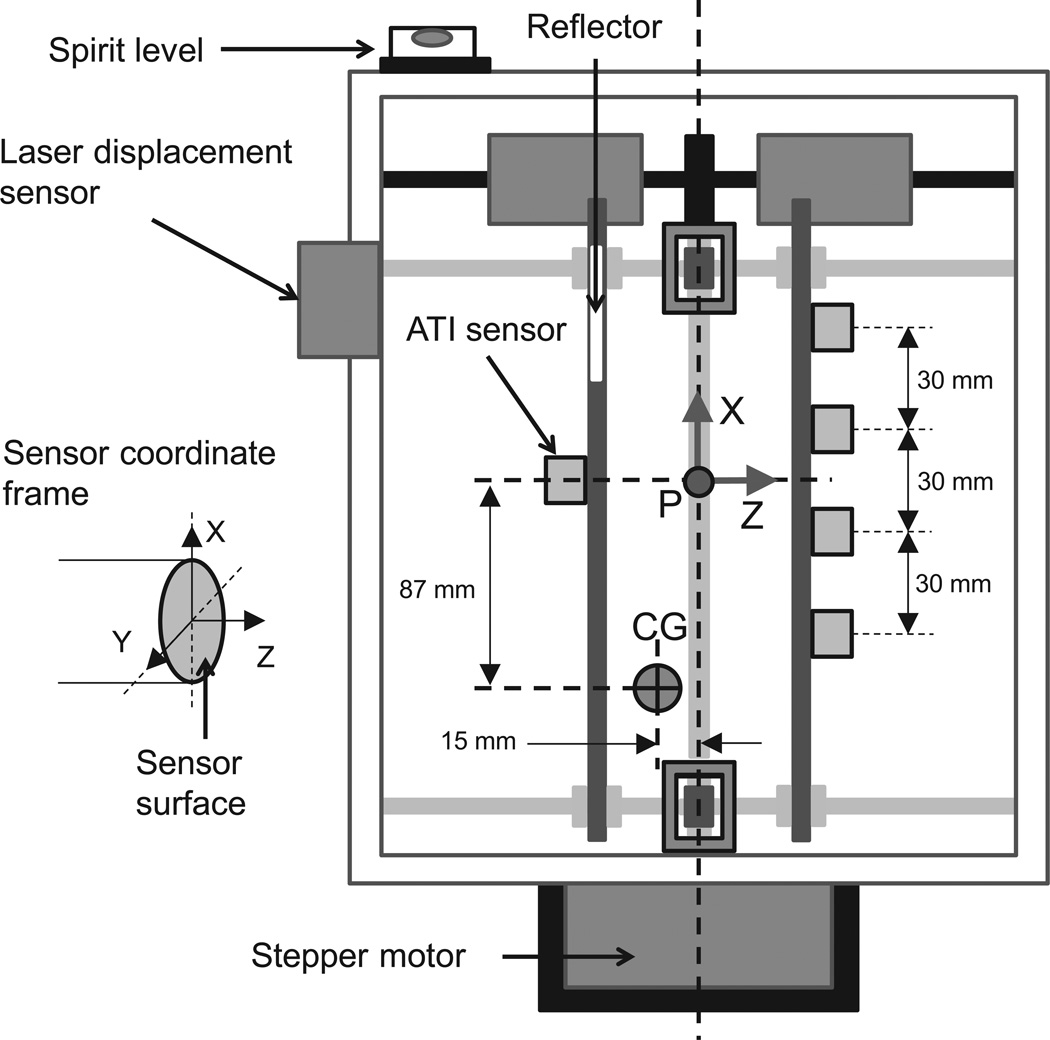
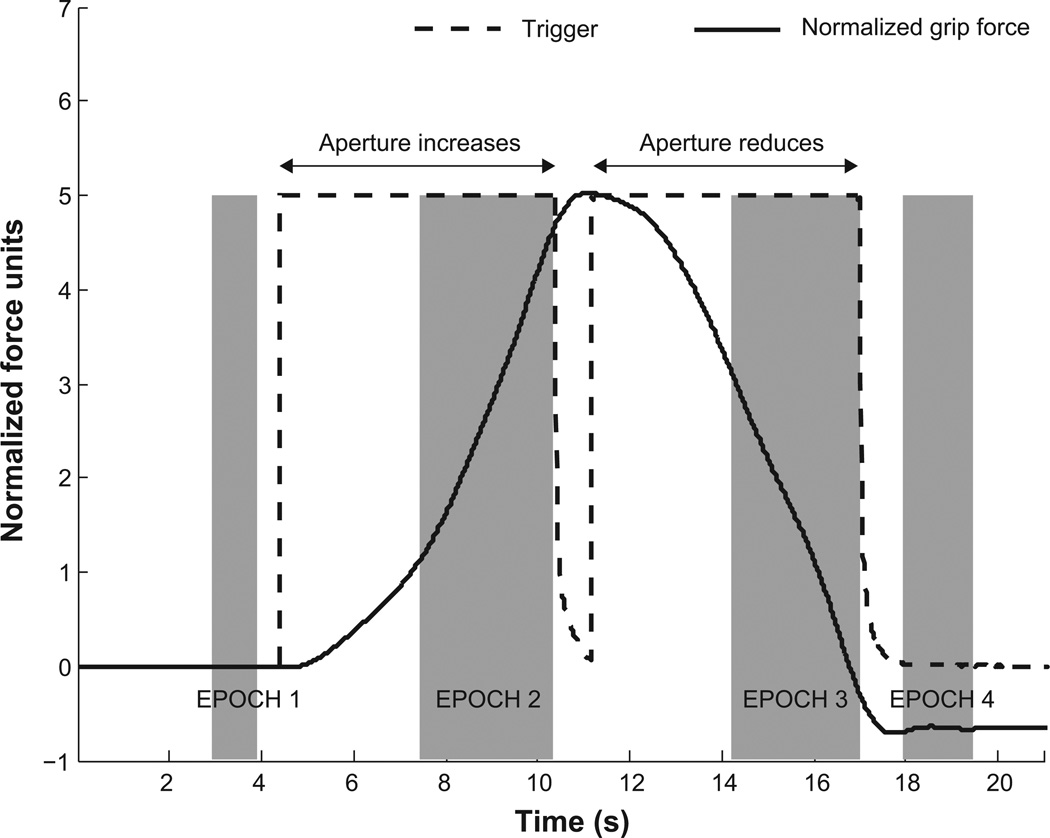
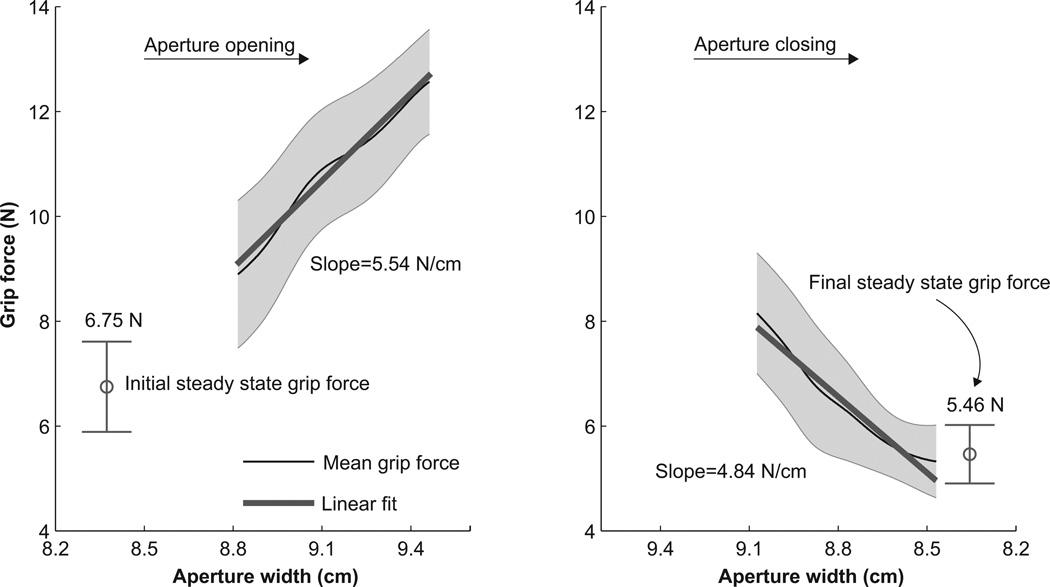
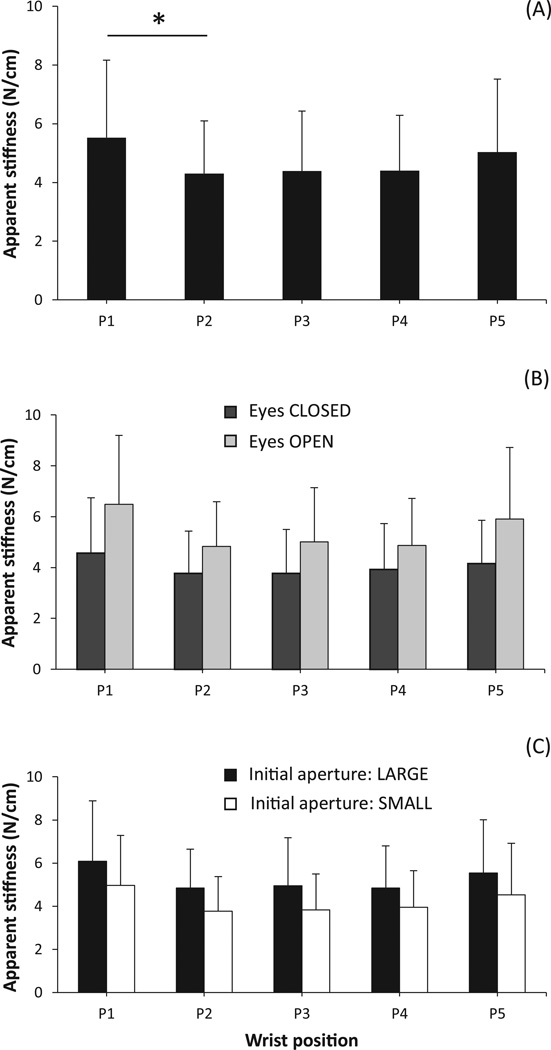
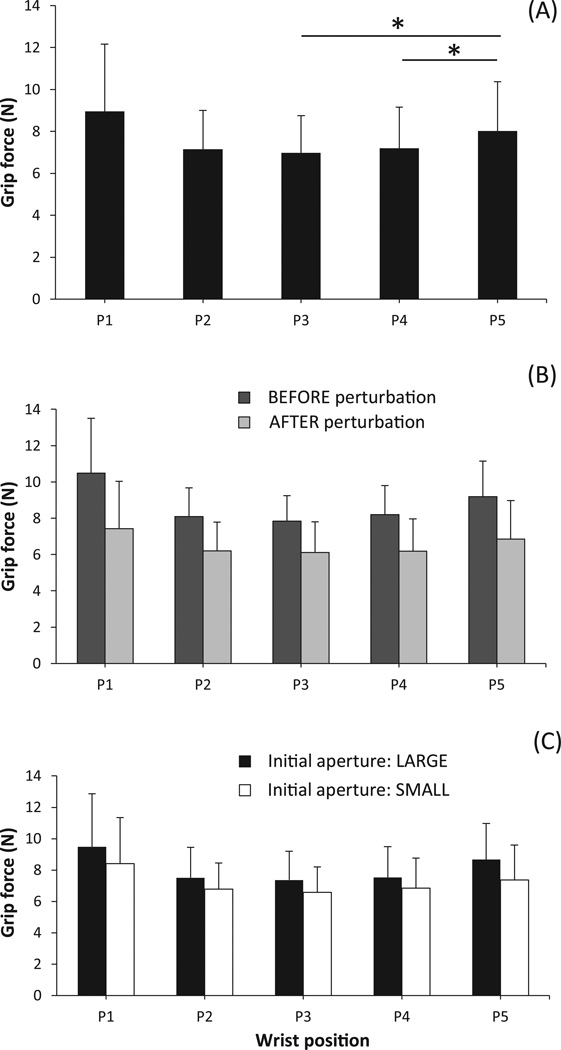
The extrinsic digit muscles naturally couple wrist action and grip force in prehensile tasks. We explored the effects of wrist position on the steady-state grip force and grip-force change during imposed changes in the grip aperture [apparent stiffness (AS)]. Subjects held an instrumented handle steady using a prismatic five-digit grip. The grip aperture was changed slowly, while the subjects were instructed not to react voluntarily to these changes. An increase in the aperture resulted in an increase in grip force, and its contraction resulted in a proportional drop in grip force. The AS values (between 4 and 6 N/cm) were consistent across a wide range of wrist positions. These values were larger when the subjects performed the task with eyes open as compared to eyes-closed trials. They were also larger for trials that started from a larger initial aperture. After a sequence of aperture increase and decrease to the initial width, grip force dropped by about 25% without the subjects being aware of this. We interpret the findings within the referent configuration hypothesis of grip-force production. The results support the idea of back-coupling between the referent and actual digit coordinates. According to this idea, the central nervous system defines referent coordinates for the digit tips, and the difference between the referent and actual coordinates leads to force production. If actual coordinates are not allowed to move to referent ones, referent coordinates show a relatively slow drift toward the actual ones.
Figures
References
-
- Bernstein N. The co-ordination and regulation of movements. Oxford: Pergamon; 1967.
-
- Brand P, Hollister A. Clinical mechanics of the hand. St. Louis: Mosby Year Book; 1999.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Research Materials
