

Intrinsic foot muscles have the capacity to control deformation of the longitudinal arch
- PMID: 24478287
- PMCID: PMC3928948
- DOI: 10.1098/rsif.2013.1188
Intrinsic foot muscles have the capacity to control deformation of the longitudinal arch
Abstract
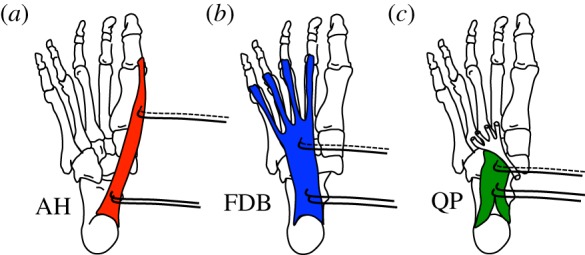
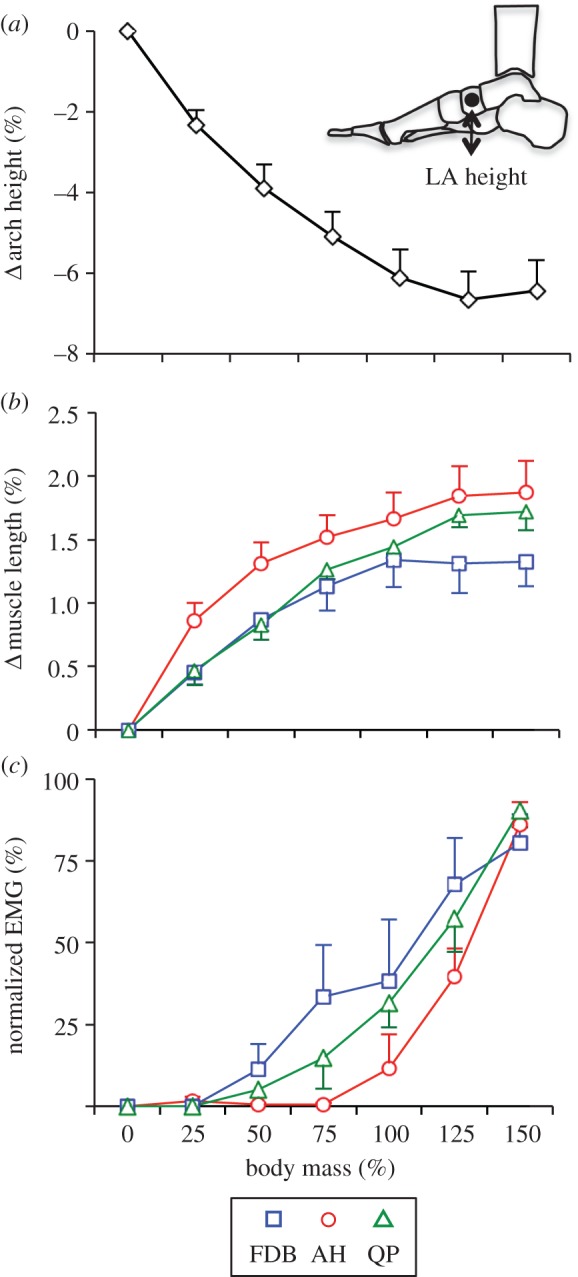
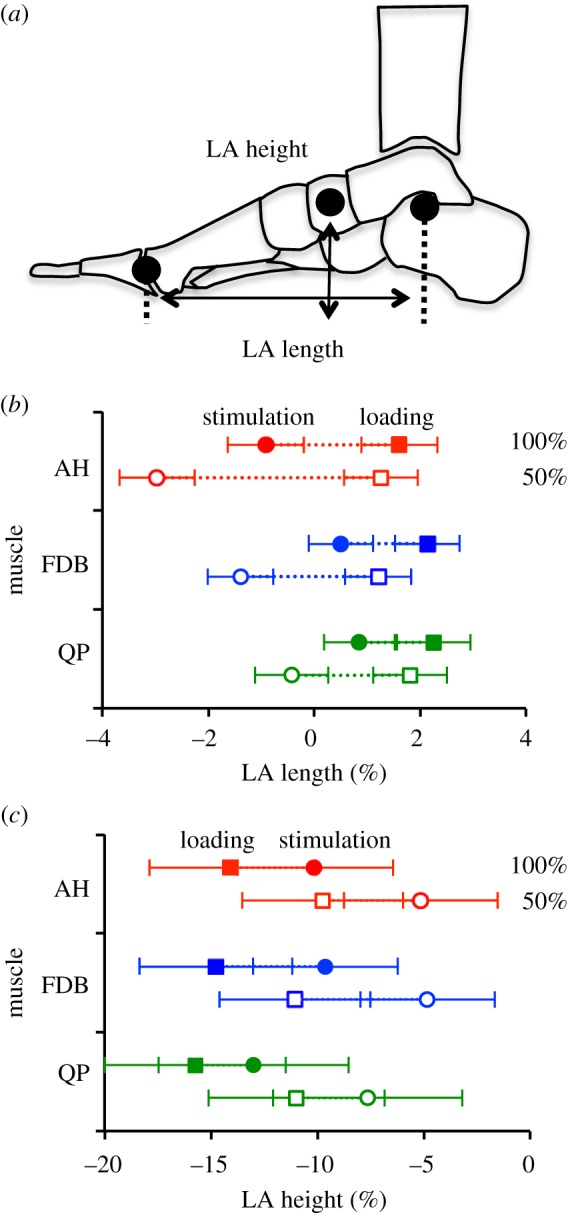
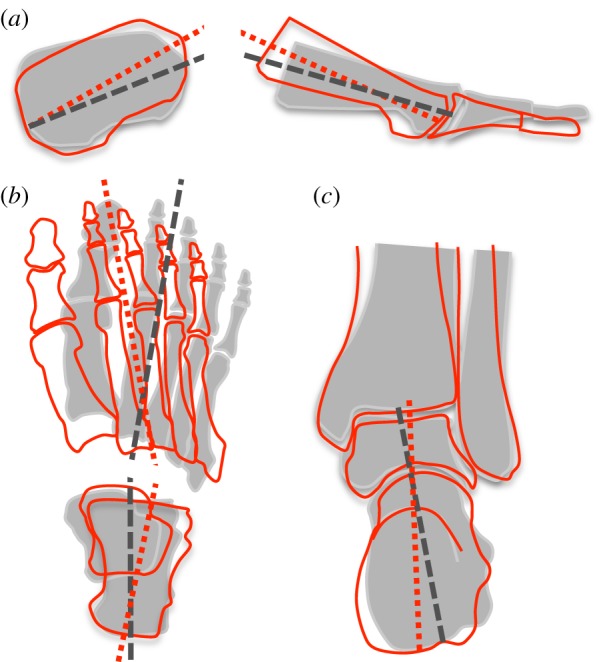
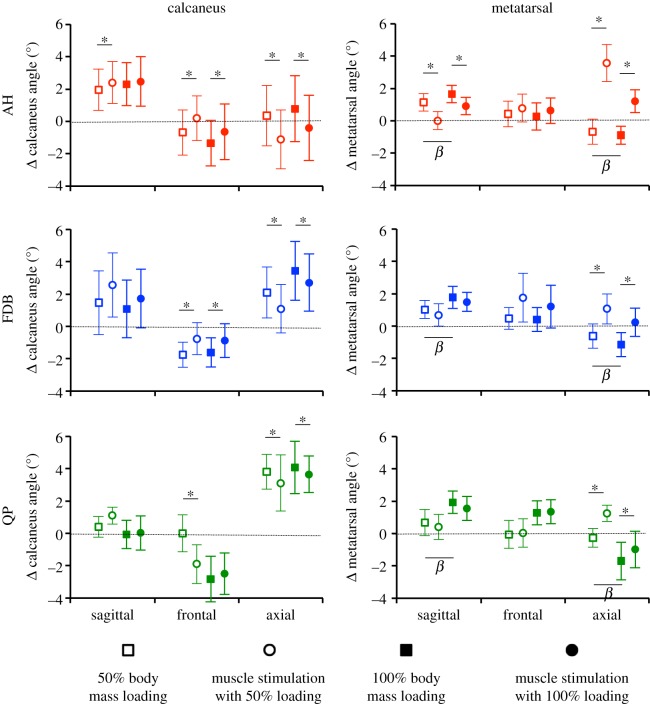
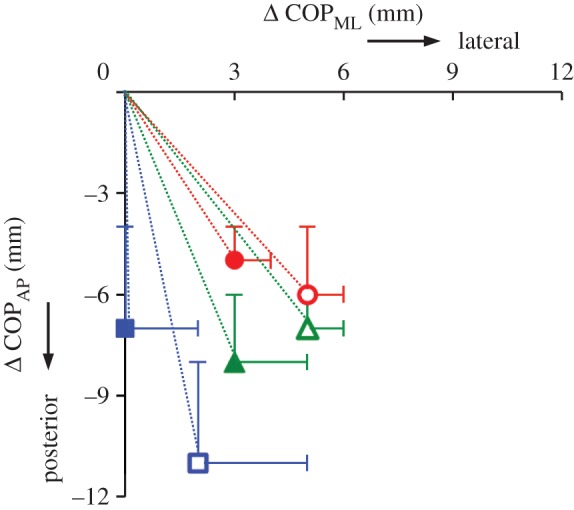
The human foot is characterized by a pronounced longitudinal arch (LA) that compresses and recoils in response to external load during locomotion, allowing for storage and return of elastic energy within the passive structures of the arch and contributing to metabolic energy savings. Here, we examine the potential for active muscular contribution to the biomechanics of arch deformation and recoil. We test the hypotheses that activation of the three largest plantar intrinsic foot muscles, abductor hallucis, flexor digitorum and quadratus plantae is associated with muscle stretch in response to external load on the foot and that activation of these muscles (via electrical stimulation) will generate sufficient force to counter the deformation of LA caused by the external load. We found that recruitment of the intrinsic foot muscles increased with increasing load, beyond specific load thresholds. Interestingly, LA deformation and muscle stretch plateaued towards the maximum load of 150% body weight, when muscle activity was greatest. Electrical stimulation of the plantar intrinsic muscles countered the deformation that occurred owing to the application of external load by reducing the length and increasing the height of the LA. These findings demonstrate that these muscles have the capacity to control foot posture and LA stiffness and may provide a buttressing effect during foot loading. This active arch stiffening mechanism may have important implications for how forces are transmitted during locomotion and postural activities as well as consequences for metabolic energy saving.
Keywords: electromyography; foot stiffness; multi-segment foot model.
Figures
References
-
- Erdemir A, Hamel AJ, Fauth AR, Piazza SJ, Sharkey NA. 2004. Dynamic loading of the plantar aponeurosis in walking. J Bone Joint Surg. Am. A 86, 546–552. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical