

Spatiotemporal dynamics of online motor correction processing revealed by high-density electroencephalography
- PMID: 24564462
- PMCID: PMC4692805
- DOI: 10.1162/jocn_a_00593
Spatiotemporal dynamics of online motor correction processing revealed by high-density electroencephalography
Abstract
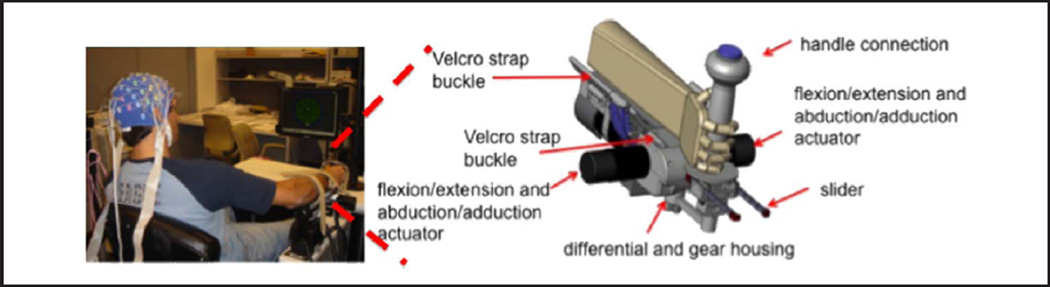
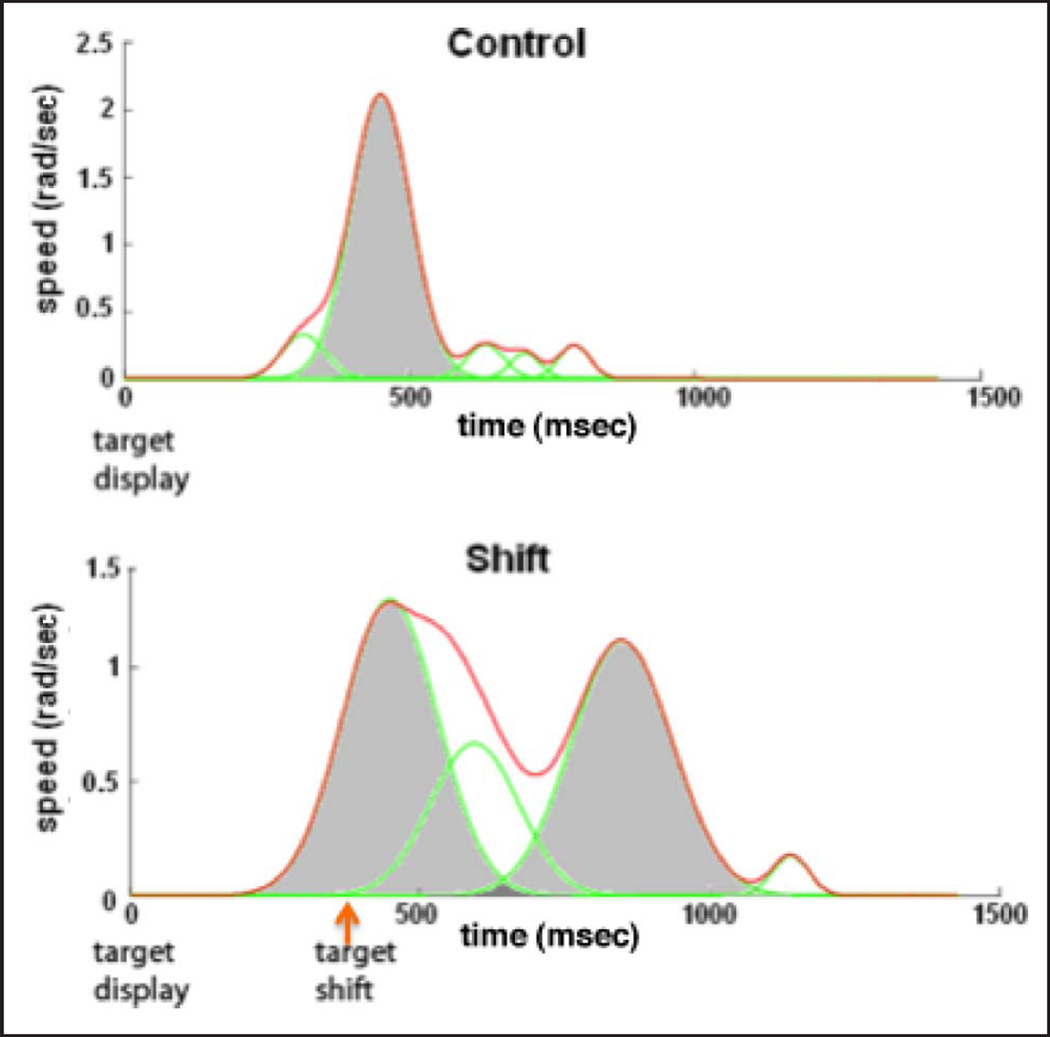
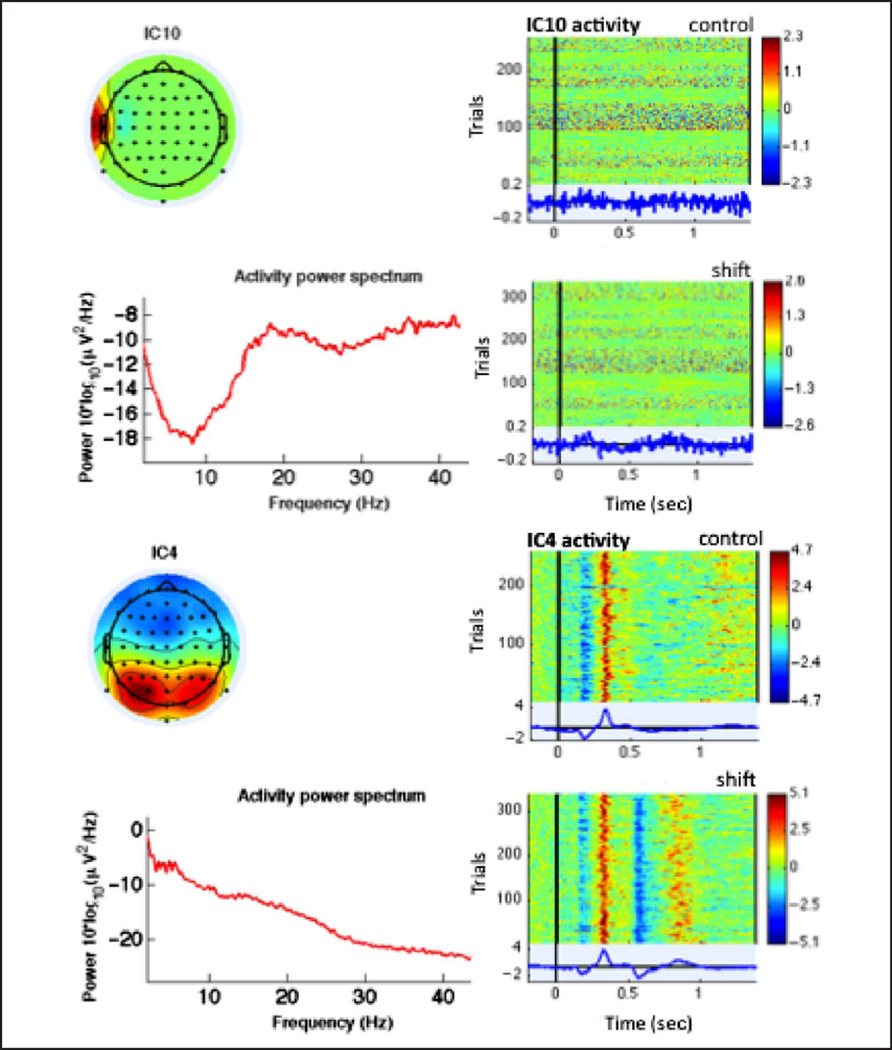
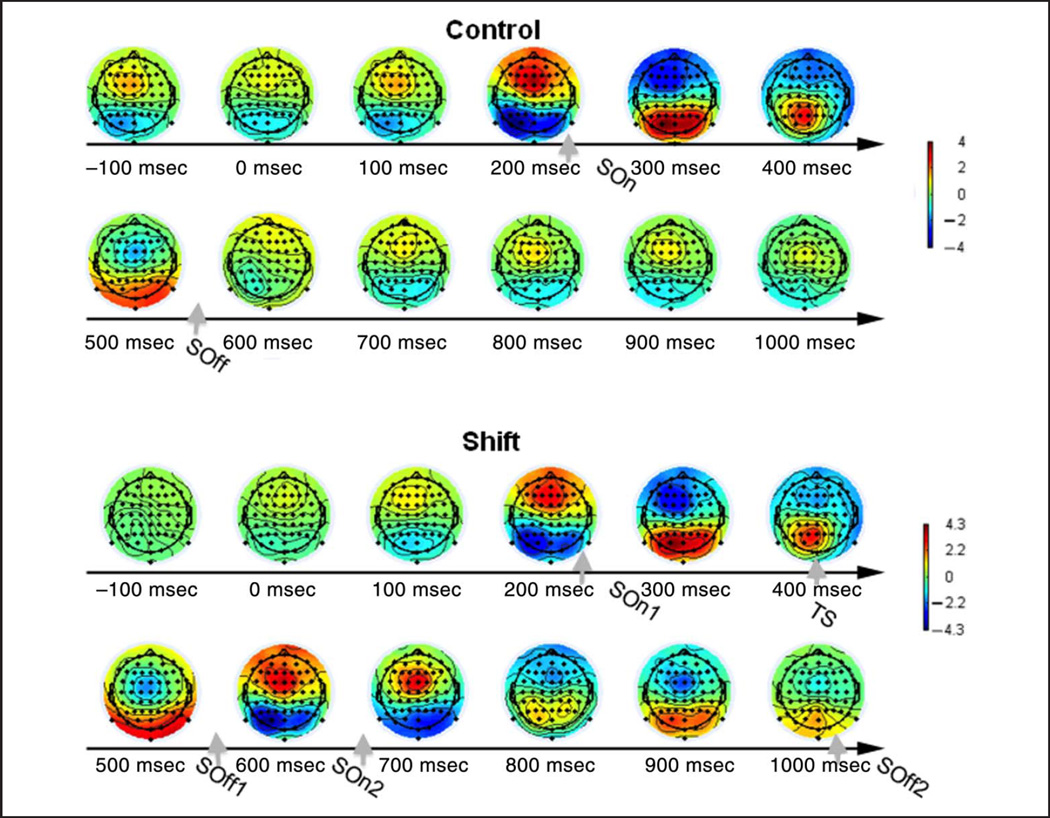
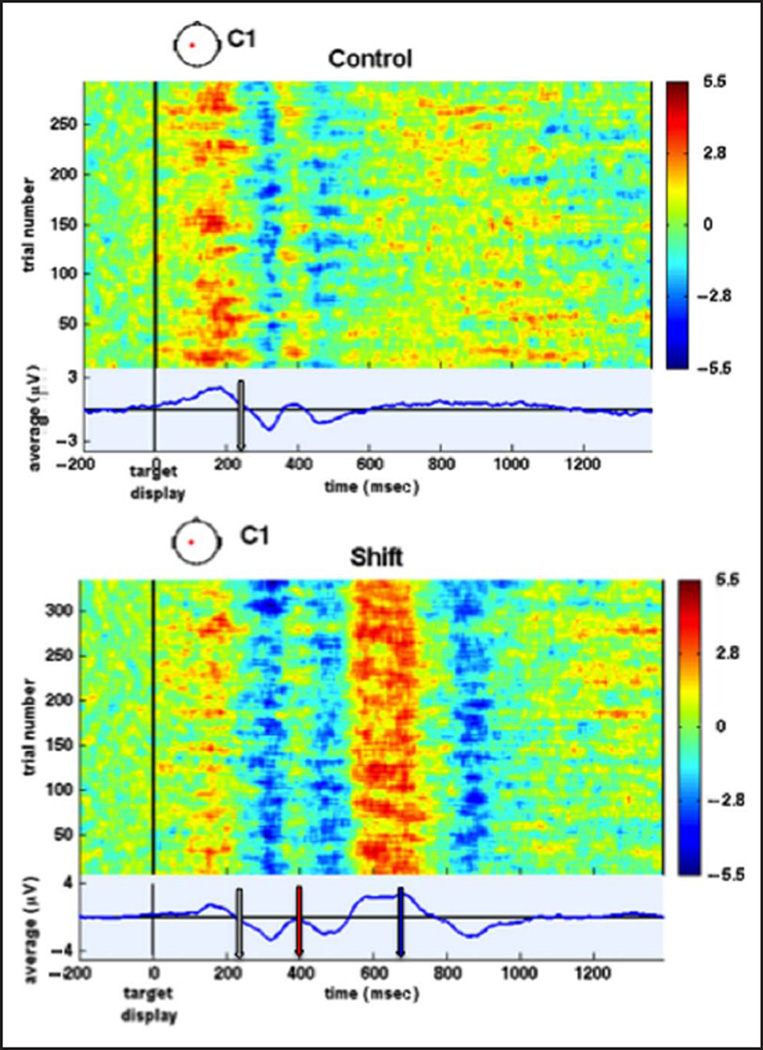
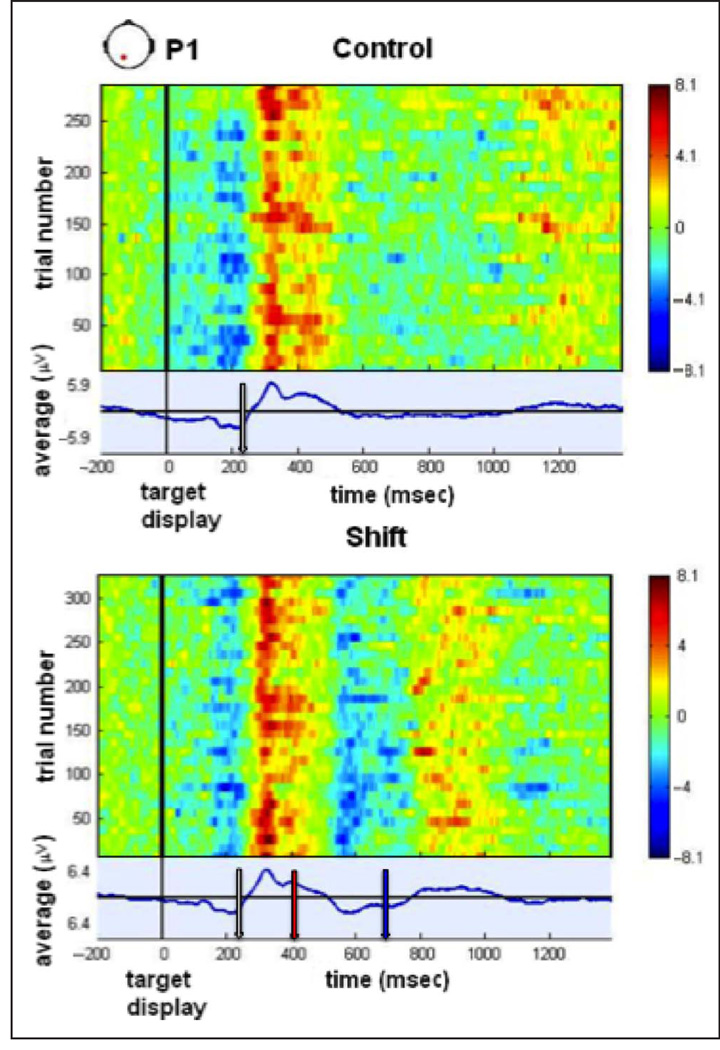
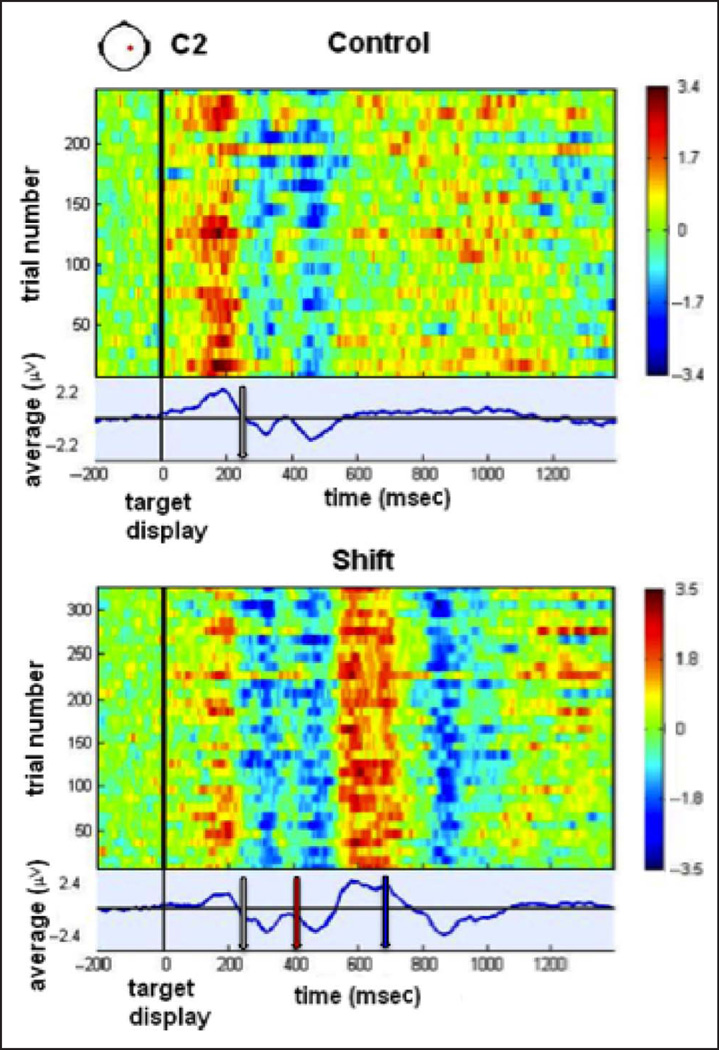
The ability to control online motor corrections is key to dealing with unexpected changes arising in the environment with which we interact. How the CNS controls online motor corrections is poorly understood, but evidence has accumulated in favor of a submovement-based model in which apparently continuous movement is segmented into distinct submovements. Although most studies have focused on submovements' kinematic features, direct links with the underlying neural dynamics have not been extensively explored. This study sought to identify an electroencephalographic signature of submovements. We elicited kinematic submovements using a double-step displacement paradigm. Participants moved their wrist toward a target whose direction could shift mid-movement with a 50% probability. Movement kinematics and cortical activity were concurrently recorded with a low-friction robotic device and high-density electroencephalography. Analysis of spatiotemporal dynamics of brain activation and its correlation with movement kinematics showed that the production of each kinematic submovement was accompanied by (1) stereotyped topographic scalp maps and (2) frontoparietal ERPs time-locked to submovements. Positive ERP peaks from frontocentral areas contralateral to the moving wrist preceded kinematic submovement peaks by 220-250 msec and were followed by positive ERP peaks from contralateral parietal areas (140-250 msec latency, 0-80 msec before submovement peaks). Moreover, individual subject variability in the latency of frontoparietal ERP components following the target shift significantly predicted variability in the latency of the corrective submovement. Our results are in concordance with evidence for the intermittent nature of continuous movement and elucidate the timing and role of frontoparietal activations in the generation and control of corrective submovements.
Figures
Similar articles
-
EEG correlates of submovements.Annu Int Conf IEEE Eng Med Biol Soc. 2011;2011:7429-32. doi: 10.1109/IEMBS.2011.6091730. Annu Int Conf IEEE Eng Med Biol Soc. 2011. PMID: 22256056
-
Action Monitoring Cortical Activity Coupled to Submovements.eNeuro. 2017 Oct 24;4(5):ENEURO.0241-17.2017. doi: 10.1523/ENEURO.0241-17.2017. eCollection 2017 Sep-Oct. eNeuro. 2017. PMID: 29071301 Free PMC article.
-
Origins of submovements in movements of elderly adults.J Neuroeng Rehabil. 2008 Nov 13;5:28. doi: 10.1186/1743-0003-5-28. J Neuroeng Rehabil. 2008. PMID: 19014548 Free PMC article.
-
Methodological Considerations in the Kinematic and Kinetic Analysis of Human Movement among Healthy Adolescents: A Scoping Review of Nonlinear Measures in Data Processing.Sensors (Basel). 2022 Dec 28;23(1):304. doi: 10.3390/s23010304. Sensors (Basel). 2022. PMID: 36616902 Free PMC article.
-
Linking brain, mind and behavior.Int J Psychophysiol. 2009 Aug;73(2):95-100. doi: 10.1016/j.ijpsycho.2008.11.008. Epub 2009 May 3. Int J Psychophysiol. 2009. PMID: 19414039 Free PMC article. Review.
Cited by
-
Characterizing and predicting submovements during human three-dimensional arm reaches.PLoS One. 2014 Jul 24;9(7):e103387. doi: 10.1371/journal.pone.0103387. eCollection 2014. PLoS One. 2014. PMID: 25057968 Free PMC article.
-
Effect of Visual Feedback on Behavioral Control and Functional Activity During Bilateral Hand Movement.Brain Topogr. 2023 Jul;36(4):517-534. doi: 10.1007/s10548-023-00969-6. Epub 2023 May 17. Brain Topogr. 2023. PMID: 37198376
-
Resting-state EEG topographies: Reliable and sensitive signatures of unilateral spatial neglect.Neuroimage Clin. 2020;26:102237. doi: 10.1016/j.nicl.2020.102237. Epub 2020 Mar 5. Neuroimage Clin. 2020. PMID: 32199285 Free PMC article.
-
Beta-band activity and connectivity in sensorimotor and parietal cortex are important for accurate motor performance.Neuroimage. 2017 Jan 1;144(Pt A):164-173. doi: 10.1016/j.neuroimage.2016.10.008. Epub 2016 Oct 14. Neuroimage. 2017. PMID: 27746389 Free PMC article.
-
Corrective jitter motion shows similar individual frequencies for the arm and the finger.Exp Brain Res. 2015 Apr;233(4):1307-20. doi: 10.1007/s00221-015-4204-1. Epub 2015 Jan 29. Exp Brain Res. 2015. PMID: 25630905
References
-
- Abend W, Bizzi E, Morasso P. Human arm trajectory formation. Brain. 1982;105:331–348. - PubMed
-
- Ang KK, Guan C, Chua KS, Ang BT, Kuah C, Wang C, et al. Clinical study of neurorehabilitation in stroke using EEG-based motor imagery brain-computer interface with robotic feedback. IEEE Engineering in Medicine and Biology Society. 2010;2010:5549–5552. - PubMed
-
- Archambault PS, Caminiti R, Battaglia-Mayer A. Cortical mechanisms for online control of hand movement trajectory: The role of the posterior parietal cortex. Cerebral Cortex. 2009;19:2848–2864. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources