

Novel application of simultaneous multi-image display during complex robotic abdominal procedures
- PMID: 24628761
- PMCID: PMC4008309
- DOI: 10.1186/1471-2482-14-13
Novel application of simultaneous multi-image display during complex robotic abdominal procedures
Abstract
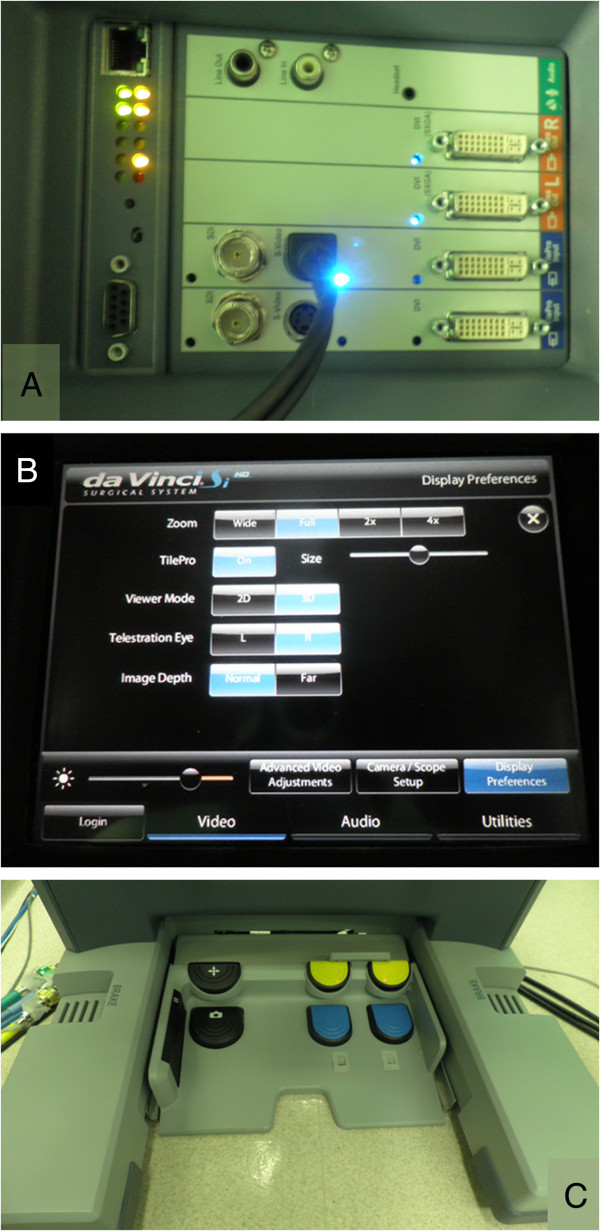
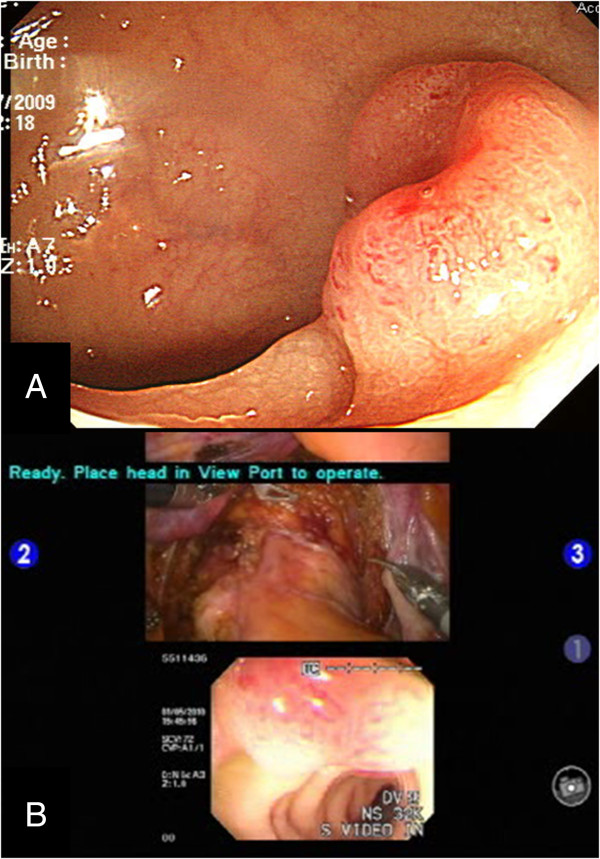
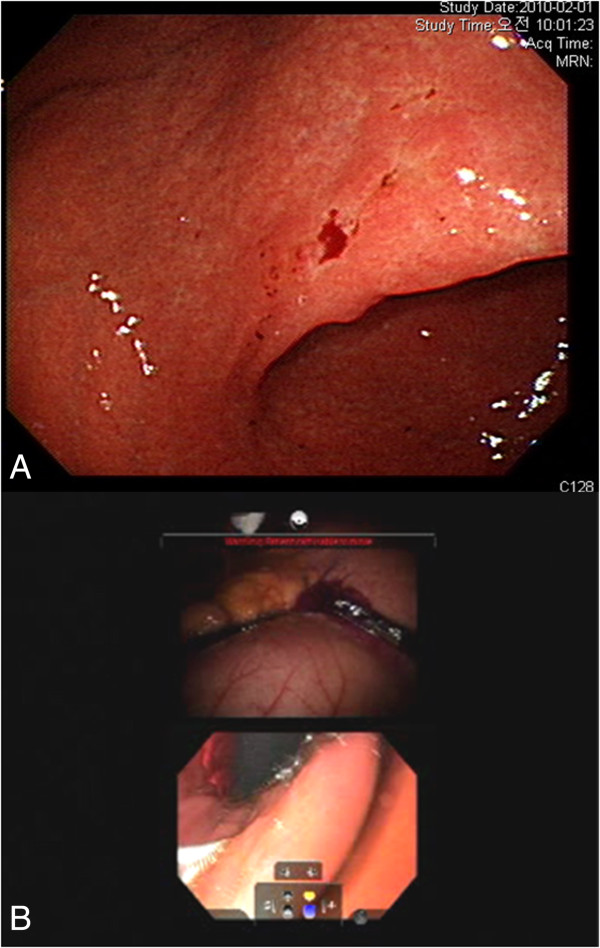
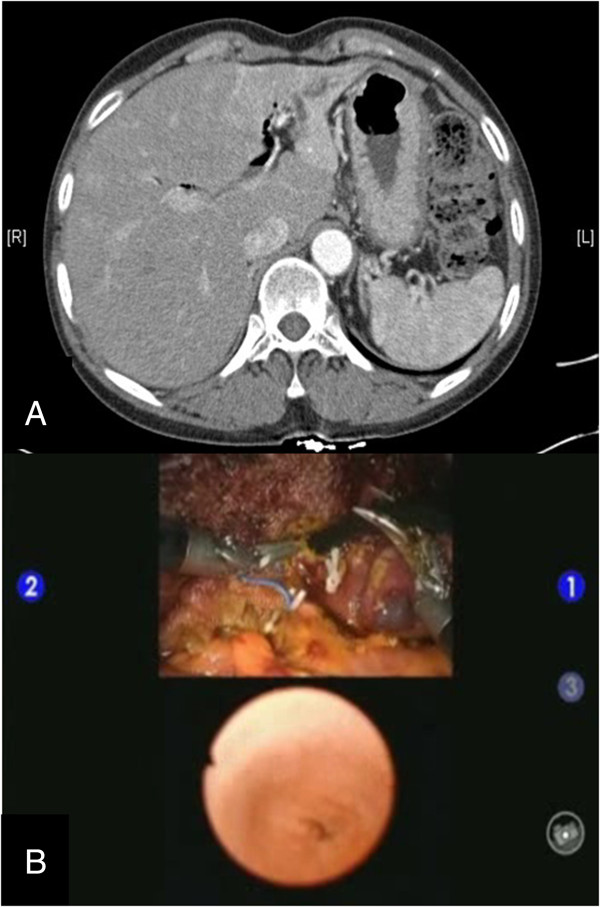
Background: The surgical robot offers the potential to integrate multiple views into the surgical console screen, and for the assistant's monitors to provide real-time views of both fields of operation. This function has the potential to increase patient safety and surgical efficiency during an operation. Herein, we present a novel application of the multi-image display system for simultaneous visualization of endoscopic views during various complex robotic gastrointestinal operations. All operations were performed using the da Vinci Surgical System (Intuitive Surgical, Sunnyvale, CA, USA) with the assistance of Tilepro, multi-input display software, during employment of the intraoperative scopes. Three robotic operations, left hepatectomy with intraoperative common bile duct exploration, low anterior resection, and radical distal subtotal gastrectomy with intracorporeal gastrojejunostomy, were performed by three different surgeons at a tertiary academic medical center.
Results: The three complex robotic abdominal operations were successfully completed without difficulty or intraoperative complications. The use of the Tilepro to simultaneously visualize the images from the colonoscope, gastroscope, and choledochoscope made it possible to perform additional intraoperative endoscopic procedures without extra monitors or interference with the operations.
Conclusion: We present a novel use of the multi-input display program on the da Vinci Surgical System to facilitate the performance of intraoperative endoscopies during complex robotic operations. Our study offers another potentially beneficial application of the robotic surgery platform toward integration and simplification of combining additional procedures with complex minimally invasive operations.
Figures
References
-
- Stulberg SD, Yaffe MA, Koo SS. Computer-assisted surgery versus manual total knee arthroplasty: a case-controlled study. J Bone Joint Surg Am. 2006;88(Suppl 4):47–54. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
