

Dynamic stability of individuals with transtibial amputation walking in destabilizing environments
- PMID: 24679710
- PMCID: PMC4043395
- DOI: 10.1016/j.jbiomech.2014.02.033
Dynamic stability of individuals with transtibial amputation walking in destabilizing environments
Abstract
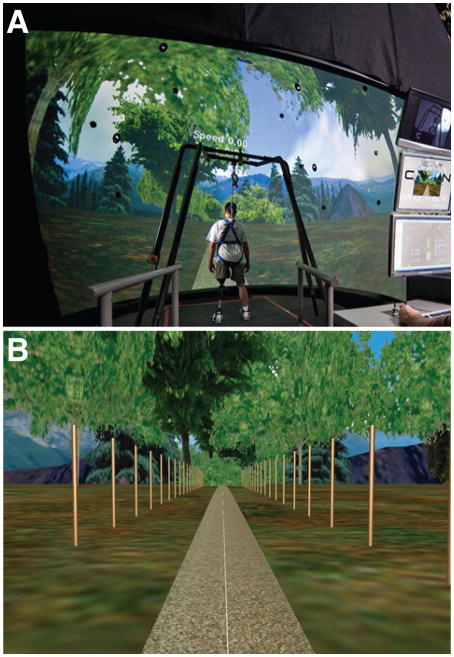
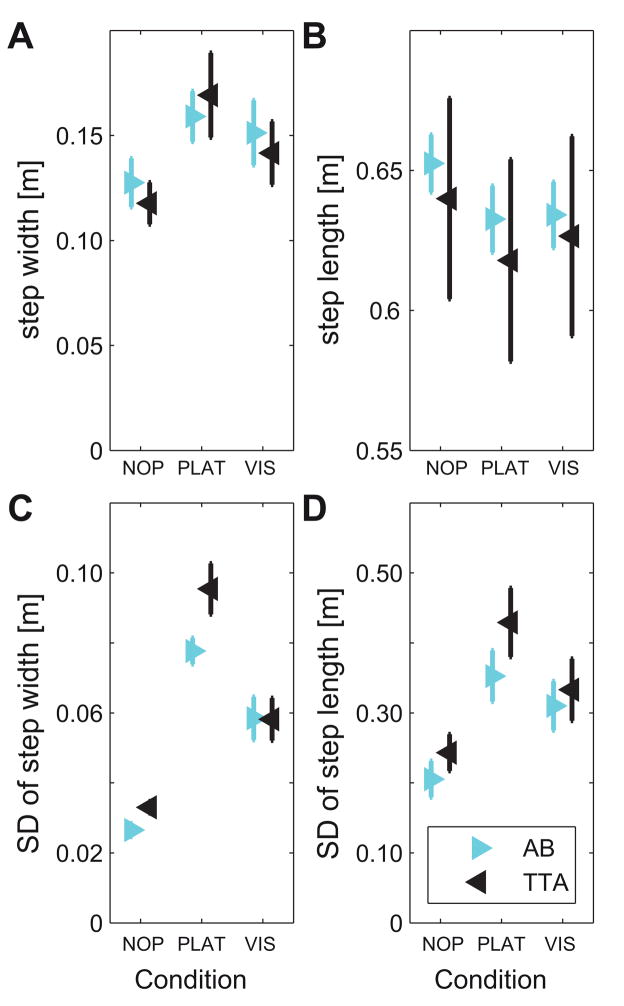
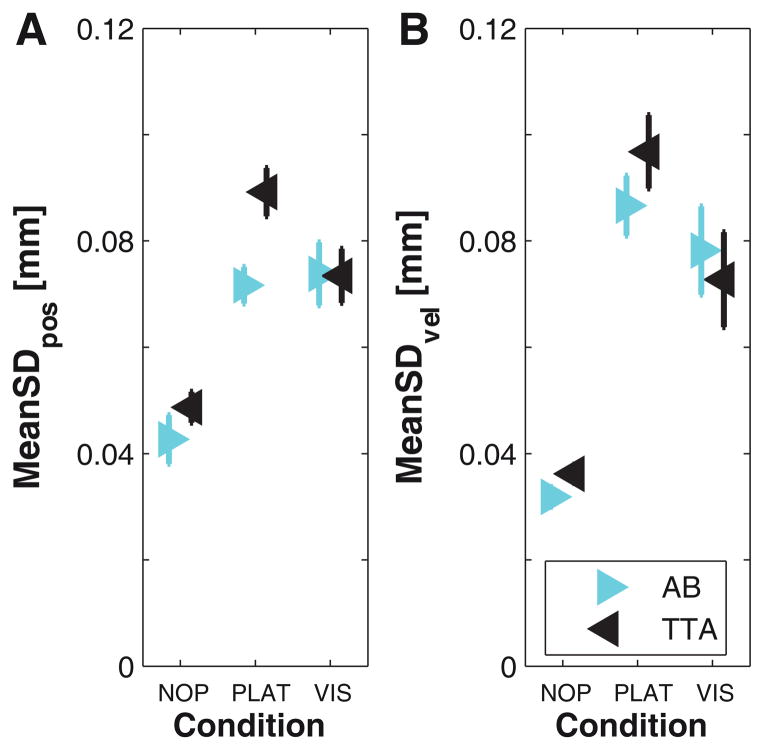
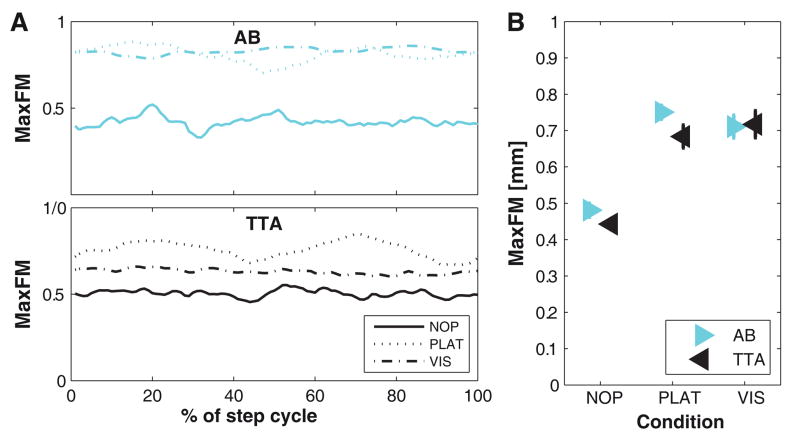
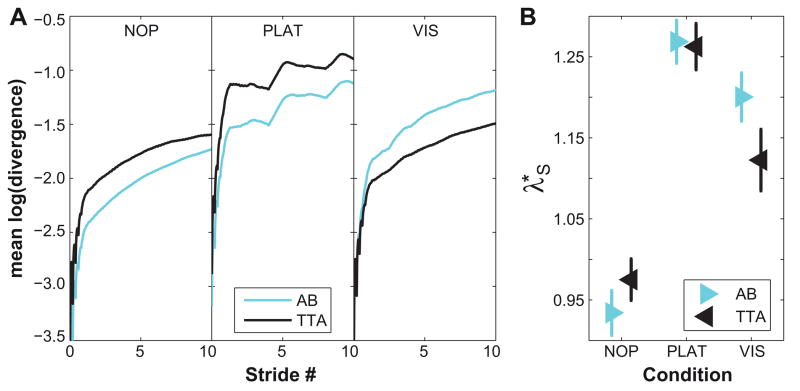
Lower limb amputation substantially disrupts motor and proprioceptive function. People with lower limb amputation experience considerable impairments in walking ability, including increased fall risk. Understanding the biomechanical aspects of the gait of these patients is crucial in improving their gait function and their quality of life. In the present study, 9 persons with unilateral transtibial amputation and 13 able-bodied controls walked on a large treadmill in a Computer Assisted Rehabilitation Environment (CAREN). While walking, subjects were either not perturbed, or were perturbed either by continuous mediolateral platform movements or by continuous mediolateral movements of the visual scene. Means and standard deviations of both step lengths and step widths increased significantly during both perturbation conditions (all p<0.001) for both groups. Measures of variability, local and orbital dynamic stability of trunk movements likewise exhibited large and highly significant increases during both perturbation conditions (all p<0.001) for both groups. Patients with amputation exhibited greater step width variability (p=0.01) and greater trunk movement variability (p=0.04) during platform perturbations, but did not exhibit greater local or orbital instability than healthy controls for either perturbation conditions. Our findings suggest that, in the absence of other co-morbidities, patients with unilateral transtibial amputation appear to retain sufficient sensory and motor function to maintain overall upper body stability during walking, even when substantially challenged. Additionally, these patients did not appear to rely more heavily on visual feedback to maintain trunk stability during these walking tasks.
Keywords: Amputation; Dynamic stability; Gait; Perturbations; Virtual reality.
Copyright © 2014 Elsevier Ltd. All rights reserved.
Conflict of interest statement
The authors declare that there is no conflict of interest associated with this work.
Figures
References
-
- Bauby CE, Kuo AD. Active control of lateral balance in human walking. Journal of Biomechanics. 2000;33 (11):1433–1440. - PubMed
-
- Bruijn SM, van Dieën JH, Meijer OG, Beek PJ. Is slow walking more stable? Journal of Biomechanics. 2009;42 (10):1506–1512. - PubMed
-
- Callisaya ML, Blizzard L, McGinley JL, Srikanth VK. Risk of falls in older people during fast-walking – the tascog study. Gait & Posture. 2012;36 (3):510–515. - PubMed
-
- Curtze C, Hof AL, Postema K, Otten B. Over rough and smooth: Amputee gait on an irregular surface. Gait & Posture. 2011;33 (2):292–296. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
