

Restoring sensorimotor function through intracortical interfaces: progress and looming challenges
- PMID: 24739786
- PMCID: PMC12278825
- DOI: 10.1038/nrn3724
Restoring sensorimotor function through intracortical interfaces: progress and looming challenges
Abstract
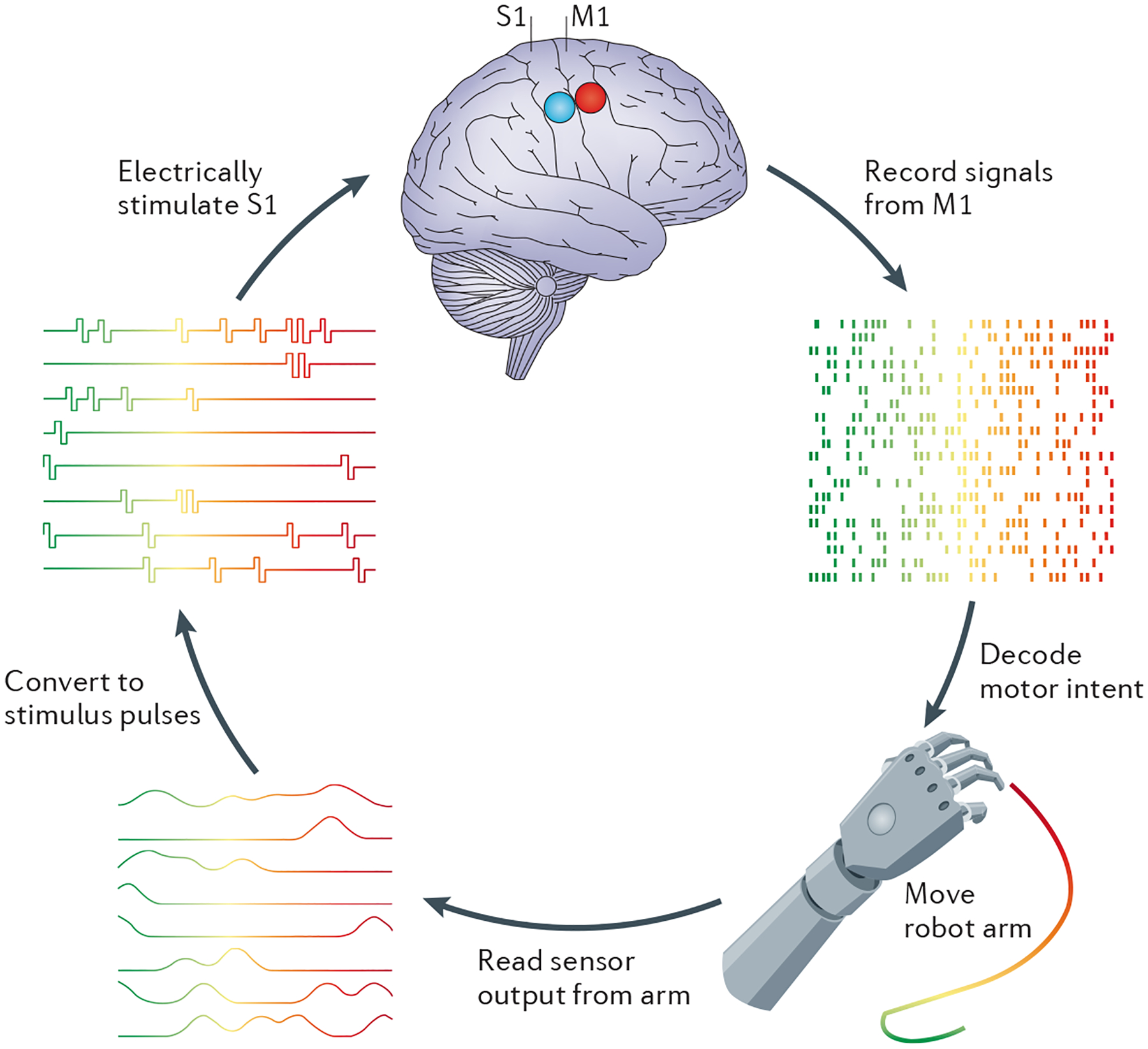
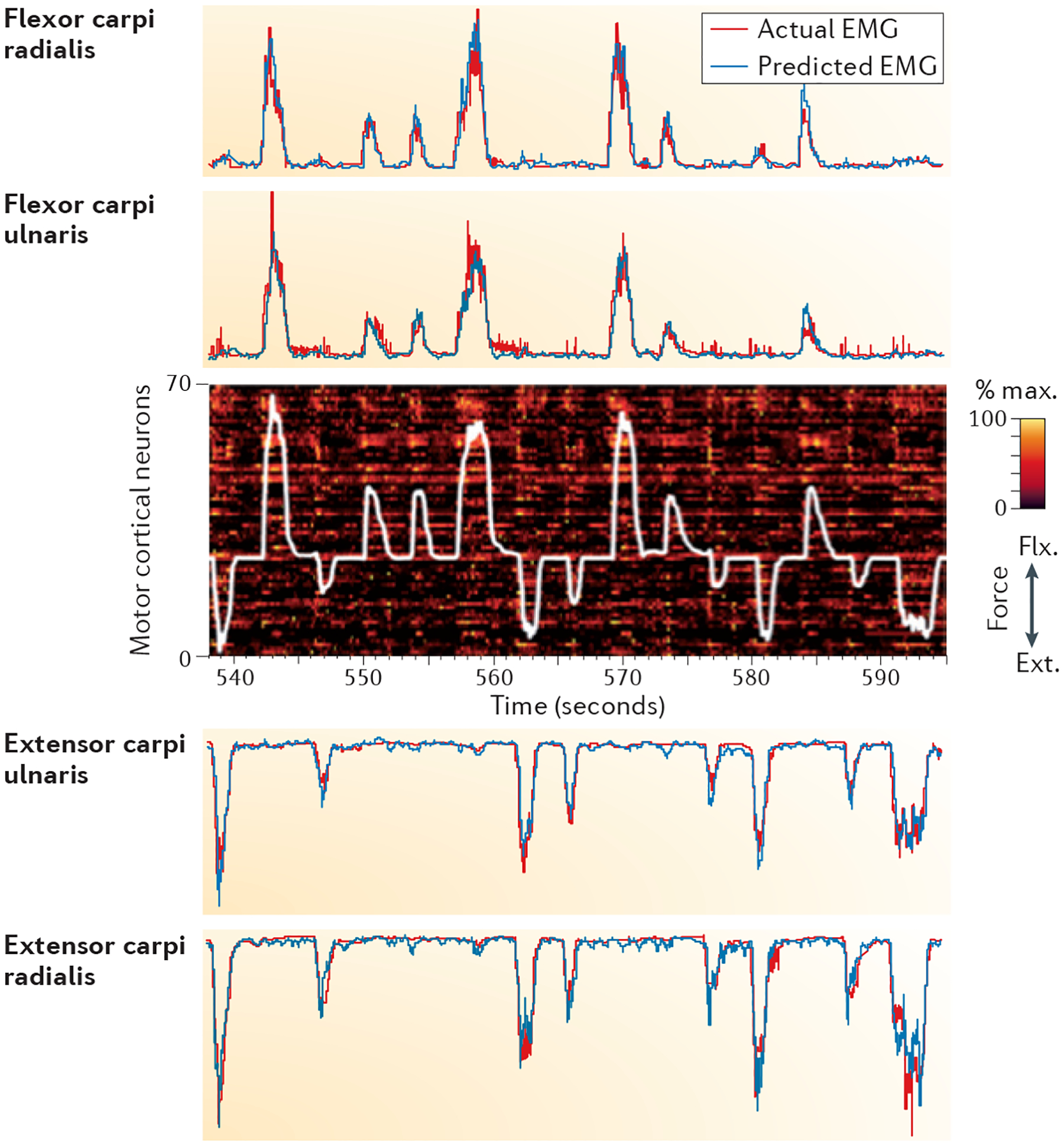
The loss of a limb or paralysis resulting from spinal cord injury has devastating consequences on quality of life. One approach to restoring lost sensory and motor abilities in amputees and patients with tetraplegia is to supply them with implants that provide a direct interface with the CNS. Such brain-machine interfaces might enable a patient to exert voluntary control over a prosthetic or robotic limb or over the electrically induced contractions of paralysed muscles. A parallel interface could convey sensory information about the consequences of these movements back to the patient. Recent developments in the algorithms that decode motor intention from neuronal activity and in approaches to convey sensory feedback by electrically stimulating neurons, using biomimetic and adaptation-based approaches, have shown the promise of invasive interfaces with sensorimotor cortices, although substantial challenges remain.
Conflict of interest statement
Competing interests statement
The authors declare no competing interests.
Figures



References
-
- Chapin JK, Moxon KA, Markowitz RS & Nicolelis MA Real-time control of a robot arm using simultaneously recorded neurons in the motor cortex. Nature Neurosci. 2, 664–670 (1999). - PubMed
-
- Velliste M, Perel S, Spalding MC, Whitford AS & Schwartz AB Cortical control of a prosthetic arm for self-feeding. Nature 453, 1098–1001 (2008). - PubMed
-
- Santhanam G, Ryu SI, Yu BM, Afshar A & Shenoy KV A high-performance brain–computer interface. Nature 442, 195–198 (2006). - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
