

Plugfest 2009: Global Interoperability in Telerobotics and Telemedicine
- PMID: 24748993
- PMCID: PMC3988879
- DOI: 10.1109/robot.2010.5509422
Plugfest 2009: Global Interoperability in Telerobotics and Telemedicine
Abstract
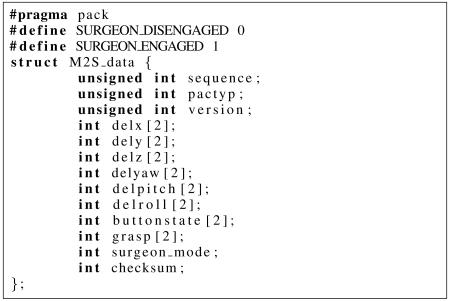
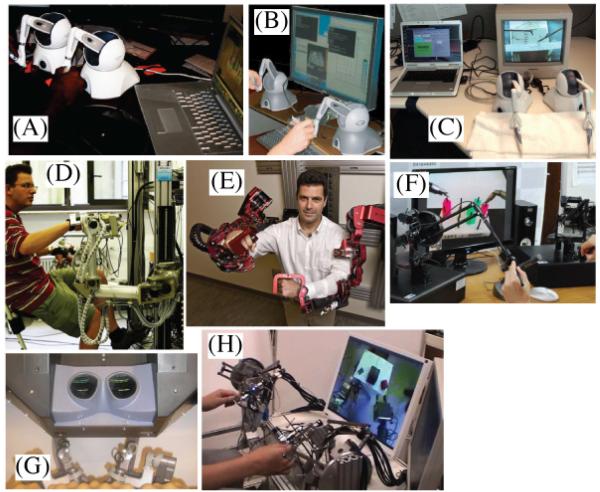
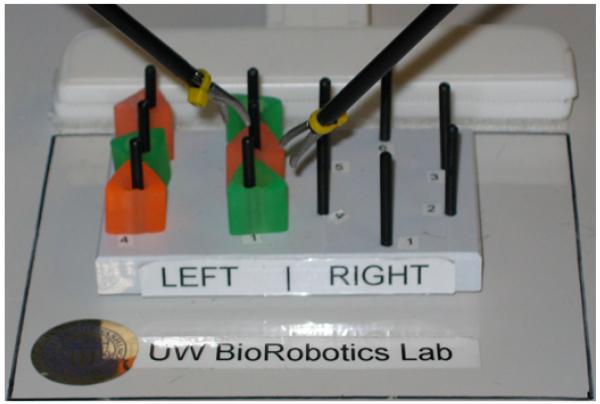
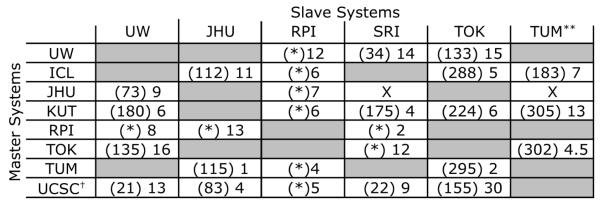
Despite the great diversity of teleoperator designs and applications, their underlying control systems have many similarities. These similarities can be exploited to enable inter-operability between heterogeneous systems. We have developed a network data specification, the Interoperable Telerobotics Protocol, that can be used for Internet based control of a wide range of teleoperators. In this work we test interoperable telerobotics on the global Internet, focusing on the telesurgery application domain. Fourteen globally dispersed telerobotic master and slave systems were connected in thirty trials in one twenty four hour period. Users performed common manipulation tasks to demonstrate effective master-slave operation. With twenty eight (93%) successful, unique connections the results show a high potential for standardizing telerobotic operation. Furthermore, new paradigms for telesurgical operation and training are presented, including a networked surgery trainer and upper-limb exoskeleton control of micro-manipulators.
Figures

Similar articles
-
Telemedicine and telerobotics: from science fiction to reality.Updates Surg. 2018 Sep;70(3):357-362. doi: 10.1007/s13304-018-0574-9. Epub 2018 Jul 28. Updates Surg. 2018. PMID: 30056519 Review.
-
Remote Assessment of Post-Stroke Elbow Function Using Internet-Based Telerobotics: A Proof-of-Concept Study.Front Neurol. 2020 Dec 3;11:583101. doi: 10.3389/fneur.2020.583101. eCollection 2020. Front Neurol. 2020. PMID: 33343489 Free PMC article.
-
Telesurgery of Microscopic Micromanipulator System "NeuRobot" in Neurosurgery: Interhospital Preliminary Study.J Brain Dis. 2009 Jul 17;1:45-53. doi: 10.4137/jcnsd.s2552. Print 2009. J Brain Dis. 2009. PMID: 23818809 Free PMC article.
-
Lapabot: a compact telesurgical robot system for minimally invasive surgery: part II. Telesurgery evaluation.Minim Invasive Ther Allied Technol. 2012 May;21(3):195-200. doi: 10.3109/13645706.2011.579978. Epub 2011 Aug 5. Minim Invasive Ther Allied Technol. 2012. PMID: 21815881
-
Telesurgery and Robotics: An Improved and Efficient Era.Cureus. 2021 Mar 26;13(3):e14124. doi: 10.7759/cureus.14124. Cureus. 2021. PMID: 33927932 Free PMC article. Review.
Cited by
-
Surgery in space: the future of robotic telesurgery.Surg Endosc. 2011 Mar;25(3):681-90. doi: 10.1007/s00464-010-1243-3. Epub 2010 Jul 22. Surg Endosc. 2011. PMID: 20652320 Review.
-
Surgeon Training in Telerobotic Surgery via a Hardware-in-the-Loop Simulator.J Healthc Eng. 2017;2017:6702919. doi: 10.1155/2017/6702919. Epub 2017 Aug 3. J Healthc Eng. 2017. PMID: 29065635 Free PMC article.
References
-
- Goldberg K, Gentner S, Sutter C, Wiegley J. The Mercury Project: A feasibility study for Internet robots. IEEE Robotics & Automation Magazine. 2000;7(1):35–40.
-
- Hannaford B, Hewitt J, Maneewarn T, Venema S, Appleby M, Ehresman R. Telerobotic remote handling of protein crystals; IEEE International Conference on Robotics and Automation; Albuquerque, NM. Apr. 1997.
-
- Sankaranarayanan G, Potter L, Hannaford B. Measurement and simulation of time varying packet delay with applications to networked haptic virtual environments; Proceedings of Robocom 2007; Athens, Greece. Oct. 2007.
-
- Oboe R, Fiorini P. A design and control environment for internet-based telerobotics. The International Journal of Robotics Research. 1998;17(4):433.
-
- Marescaux J, Leroy J, Gagner M, Rubino F, Mutter D, Vix M, Butner SE, Smith MK. Transatlantic robot-assisted telesurgery. Nature. 2001 Sep;413(27):379–380. - PubMed
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources