

Estimation of human ankle impedance during the stance phase of walking
- PMID: 24760937
- PMCID: PMC5823694
- DOI: 10.1109/TNSRE.2014.2307256
Estimation of human ankle impedance during the stance phase of walking
Abstract
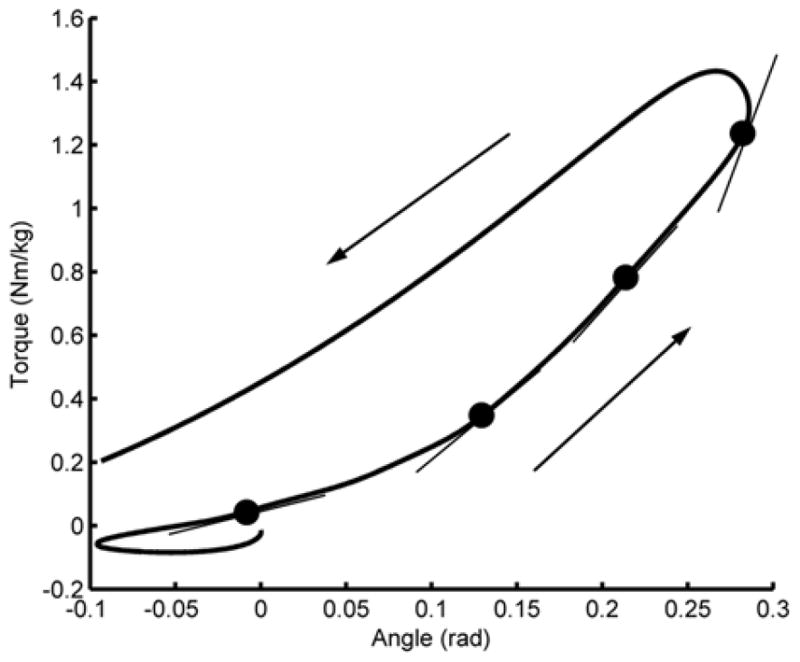
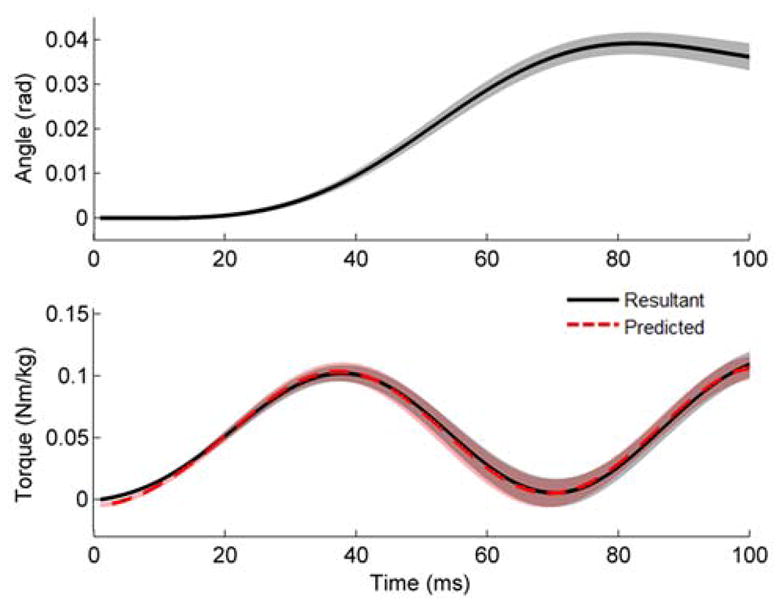
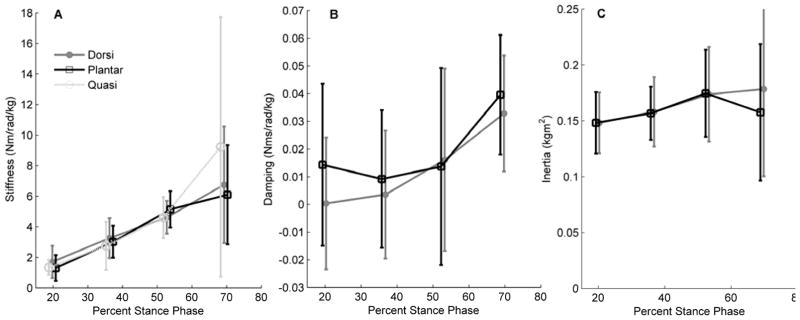
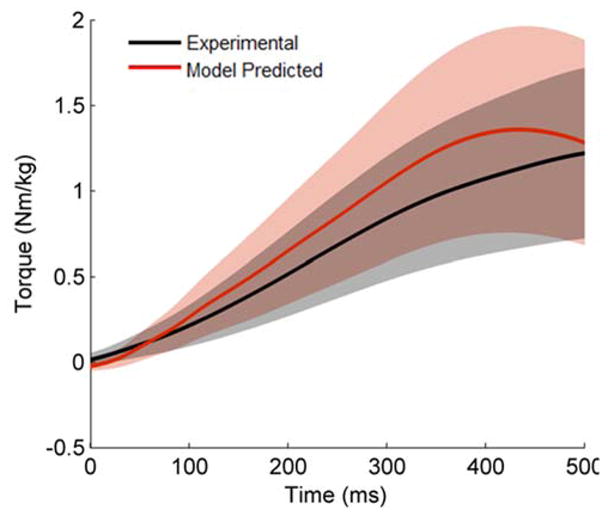
Human joint impedance is the dynamic relationship between the differential change in the position of a perturbed joint and the corresponding response torque; it is a fundamental property that governs how humans interact with their environments. It is critical to characterize ankle impedance during the stance phase of walking to elucidate how ankle impedance is regulated during locomotion, as well as provide the foundation for future development of natural, biomimetic powered prostheses and their control systems. In this study, ankle impedance was estimated using a model consisting of stiffness, damping and inertia. Ankle torque was well described by the model, accounting for 98 ±1.2% of the variance. When averaged across subjects, the stiffness component of impedance was found to increase linearly from 1.5 to 6.5 Nm/rad/kg between 20% and 70% of stance phase. The damping component was found to be statistically greater than zero only for the estimate at 70% of stance phase, with a value of 0.03 Nms/rad/kg. The slope of the ankle's torque-angle curve-known as the quasi-stiffness-was not statistically different from the ankle stiffness values, and showed remarkable similarity. Finally, using the estimated impedance, the specifications for a biomimetic powered ankle prosthesis were introduced that would accurately emulate human ankle impedance during locomotion.
Figures
References
-
- Winter DA. Energy generation and absorption at the ankle and knee during fast, natural, and slow cadences. Clin Orthop. 1983;(175):147. - PubMed
-
- Neptune R, Zajac F, Kautz S. Muscle force redistributes segmental power for body progression during walking. Gait Posture. 2004;19(2):194–205. - PubMed
-
- Mann RA, Hagy J. Biomechanics of walking, running, and sprinting. The American journal of sports medicine. 1980;8(5):345–350. - PubMed
-
- Kadaba MP, Ramakrishnan H, Wootten M. Measurement of lower extremity kinematics during level walking. J Orthop Res. 1990;8(3):383–392. - PubMed
-
- Eng JJ, Winter DA. Kinetic analysis of the lower limbs during walking: what information can be gained from a three-dimensional model? J Biomech. 1995;28(6):753–758. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
