

Development of a micro-step voltage-fed actuator with a novel stepper motor for automobile AGS systems
- PMID: 24803193
- PMCID: PMC4063054
- DOI: 10.3390/s140508026
Development of a micro-step voltage-fed actuator with a novel stepper motor for automobile AGS systems
Abstract
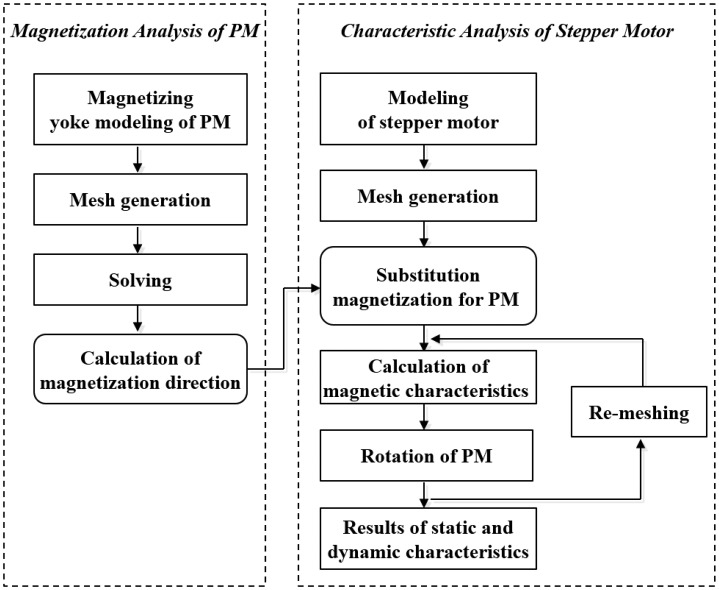
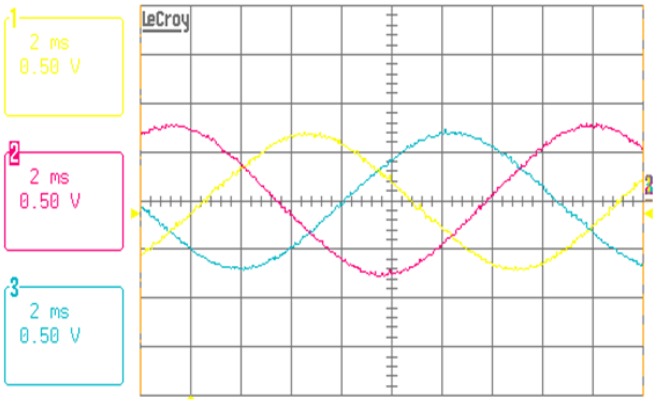
This paper presents an improved micro-step voltage-fed actuator for an automobile active grill shutter (AGS) system. A novel structured stepper motor, which contains both the main and auxiliary teeth in the stator, is proposed for the actuator. In a normal permanent magnet (PM) motor coils are generally wound on all the stator teeth, however, in the proposed motor, the winding is only on the main teeth. Because of the absence of coils in the auxiliary teeth, the proposed stepper motor possesses the following advantages: simple structure, lighter weight, smaller volume, and less time consumption. The unique auxiliary poles in the stepper motor supply the flux path to increase the step resolution even without any coils. The characteristics of the proposed stepper motor were investigated using finite element analysis. In particular, the effect of the magnetization distribution of the PM on the motor performance was investigated during the analysis. Cogging torque, which causes noise and vibration issues, was minimized by the tooth-shape optimization. In addition, a micro-step voltage-fed algorithm was implemented for a high-resolution position control. By employing a current close to a sine wave using space vector pulse-width modulation, a high-quality current waveform with a high resolution was obtained. Finally, the proposed prototype was fabricated, and the cogging torque, back-electromotive force, and current characteristics were measured by mounting the prototype on the AGS system. Both the analysis and experimental results validate the performance improvement from the proposed motor and its possible application for the flap control of the AGS system.
Figures











References
-
- Acarnley P. Stepping Motors: A Guide to Modern Theory and Practice. 4th ed. IET; Michael Faraday House, London, UK: 2002. (IEE Control Engineering Series 63).
-
- Baluta G. Microstepping mode for stepper motor control. Proceedings of 2007 International Symposium on Signals, Circuits and Systems (ISSCS); Iasi, Romania. 13–14 July 2007; pp. 1–4.
-
- Lee D.-H., Che W., Ahn J.-W. Micro-step position control with a simple voltage controller using low-cost micro-processor. Proceedings of 2010 IEEE International Symposium on Industrial Electronics (ISIE); Bari, Italy. 4–7 July 2010; pp. 1378–1382.
-
- Rhyu S.-H., Kwon B.-I. Newly structured micro permanent magnet type stepping motor with claw-poles. IEEE Trans. Magn. 2006;42(Suppl. 4):1331–1334.
-
- Hava A.M., Sul S.K., Kerkman R.J., Lipo T.A. Dynamic overmodulation characteristics of triangle intersection PWM methods. IEEE Trans. Ind. Appl. 1999;35(Suppl. 4):896–907.
Publication types
LinkOut - more resources
Full Text Sources
Other Literature Sources
