

Through the eyes of a bird: modelling visually guided obstacle flight
- PMID: 24812052
- PMCID: PMC4032538
- DOI: 10.1098/rsif.2014.0239
Through the eyes of a bird: modelling visually guided obstacle flight
Erratum in
-
Correction to 'Through the eyes of a bird: modelling visually guided obstacle flight'.J R Soc Interface. 2016 Dec;13(125):20160934. doi: 10.1098/rsif.2016.0934. J R Soc Interface. 2016. PMID: 28003525 Free PMC article. No abstract available.
Abstract
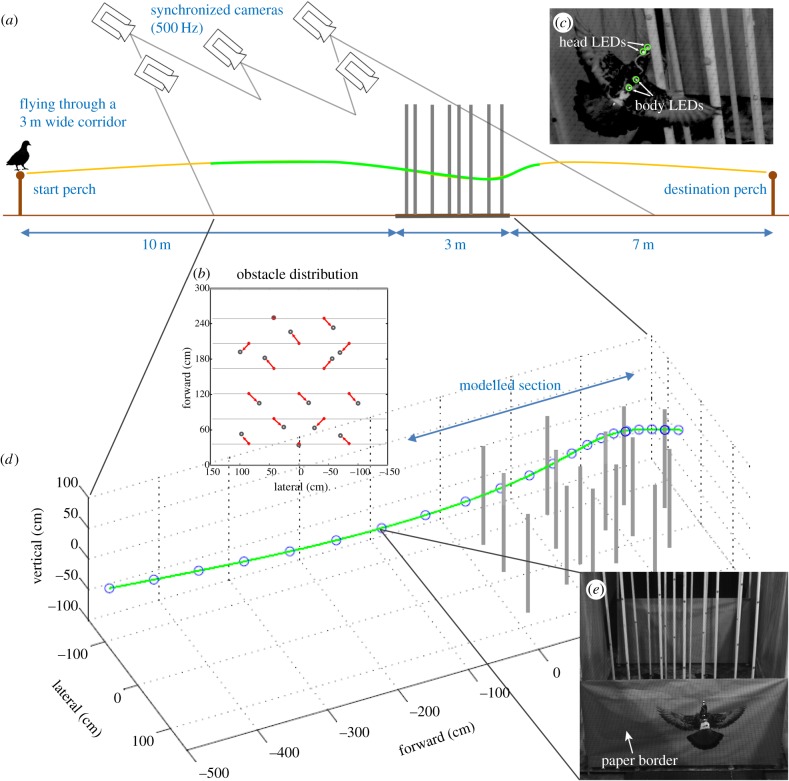
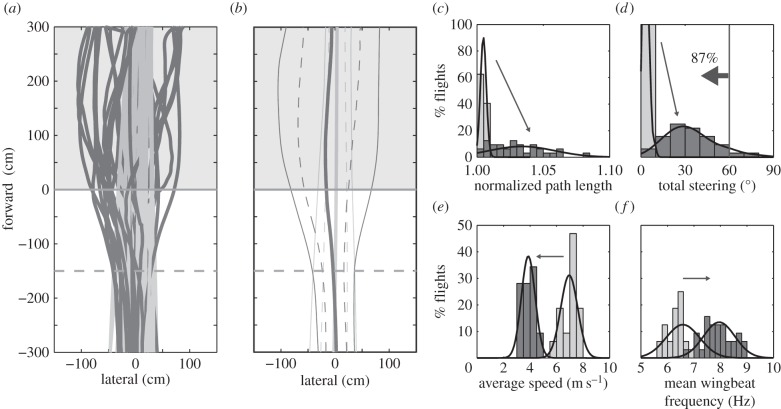
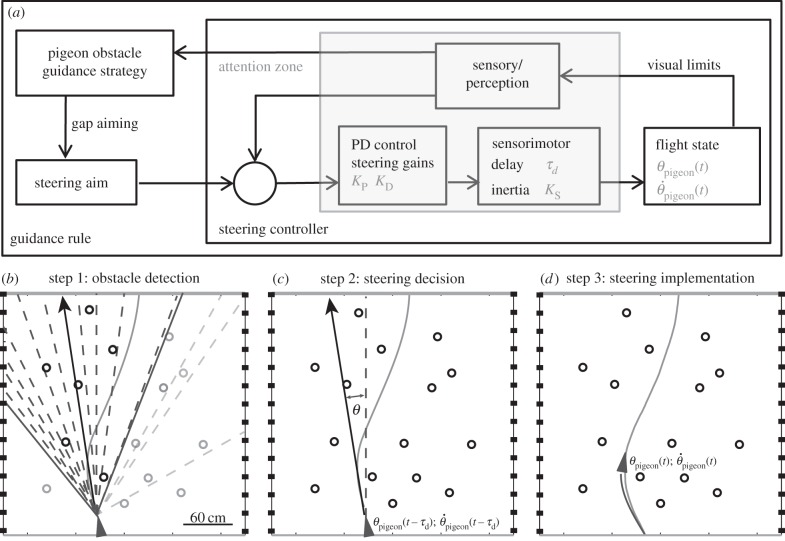
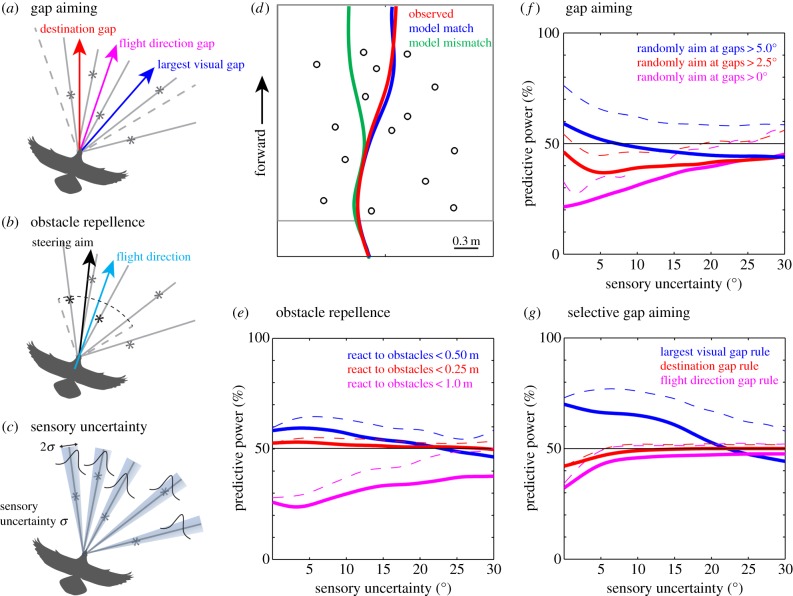
Various flight navigation strategies for birds have been identified at the large spatial scales of migratory and homing behaviours. However, relatively little is known about close-range obstacle negotiation through cluttered environments. To examine obstacle flight guidance, we tracked pigeons (Columba livia) flying through an artificial forest of vertical poles. Interestingly, pigeons adjusted their flight path only approximately 1.5 m from the forest entry, suggesting a reactive mode of path planning. Combining flight trajectories with obstacle pole positions, we reconstructed the visual experience of the pigeons throughout obstacle flights. Assuming proportional-derivative control with a constant delay, we searched the relevant parameter space of steering gains and visuomotor delays that best explained the observed steering. We found that a pigeon's steering resembles proportional control driven by the error angle between the flight direction and the desired opening, or gap, between obstacles. Using this pigeon steering controller, we simulated obstacle flights and showed that pigeons do not simply steer to the nearest opening in the direction of flight or destination. Pigeons bias their flight direction towards larger visual gaps when making fast steering decisions. The proposed behavioural modelling method converts the obstacle avoidance behaviour into a (piecewise) target-aiming behaviour, which is better defined and understood. This study demonstrates how such an approach decomposes open-loop free-flight behaviours into components that can be independently evaluated.
Keywords: flight guidance; obstacle negotiation; path planning; pigeon flight; proportional–derivative controller.
Figures
References
-
- Norberg UM. 1990. Vertebrate flight: mechanics, physiology, morphology, ecology and evolution. Zoophysiology Series. Berlin, Germany: Springer.
-
- Baptista L, Trail P, Horblit H. 1997. Family Columbidae. In Handbook of the birds of the world, vol. 4 (eds del Hoyo J, Elliott A, Sargatal J.), pp. 60–243. Barcelona, Spain: Lynx Edicions.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Miscellaneous
