

doi: 10.3390/s140508430.
The use of accelerometers and gyroscopes to estimate hip and knee angles on gait analysis
Affiliations
- PMID: 24828578
- PMCID: PMC4063036
- DOI: 10.3390/s140508430
Item in Clipboard
The use of accelerometers and gyroscopes to estimate hip and knee angles on gait analysis
Sensors (Basel).
.
Abstract
In this paper the performance of a sensor system, which has been developed to estimate hip and knee angles and the beginning of the gait phase, have been investigated. The sensor system consists of accelerometers and gyroscopes. A new algorithm was developed in order to avoid the error accumulation due to the gyroscopes drift and vibrations due to the ground contact at the beginning of the stance phase. The proposed algorithm have been tested and compared to some existing algorithms on over-ground walking trials with a commercial device for assisted gait. The results have shown the good accuracy of the angles estimation, also in high angle rate movement.
Figures
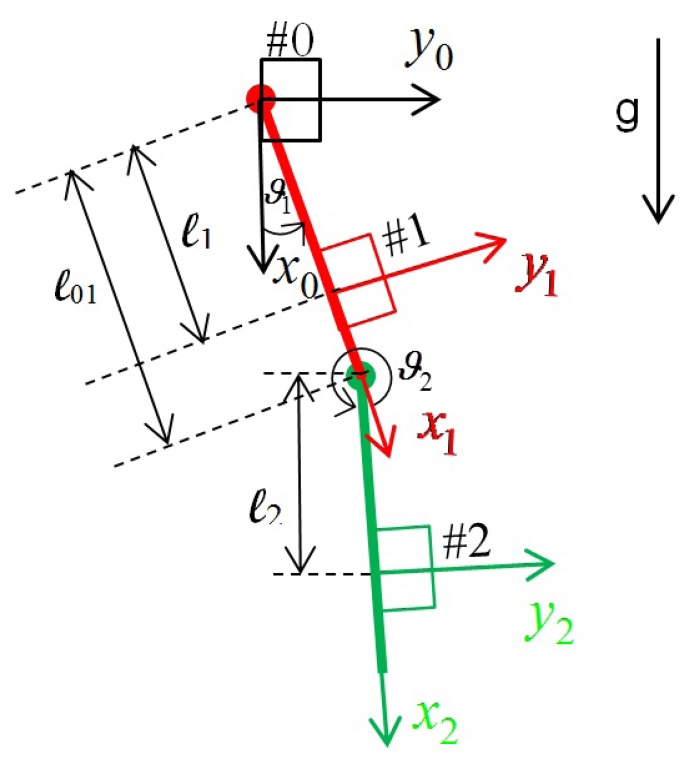
Kinematic scheme of a leg.
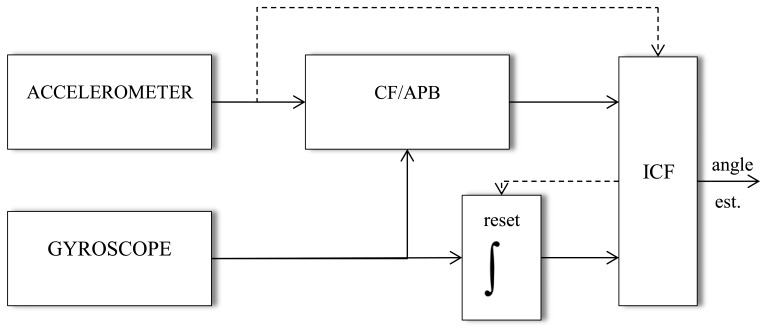
Schematic structure of the intelligent complementary filter (ICF) method.
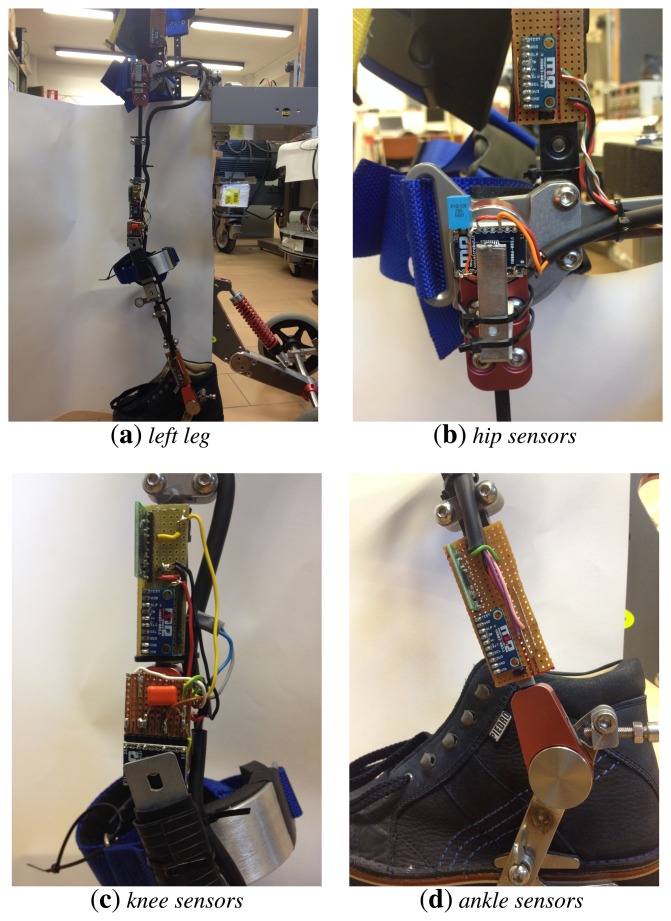
(a) Left leg of the modified commercial device for assisted gait (NF-Walker) used in the experiments; (b) particulars of the hip accelerometer and encoder; (c) particulars of the knee gyro, accelerometer and encoder; (d) particulars of the ankle gyro and accelerometer.
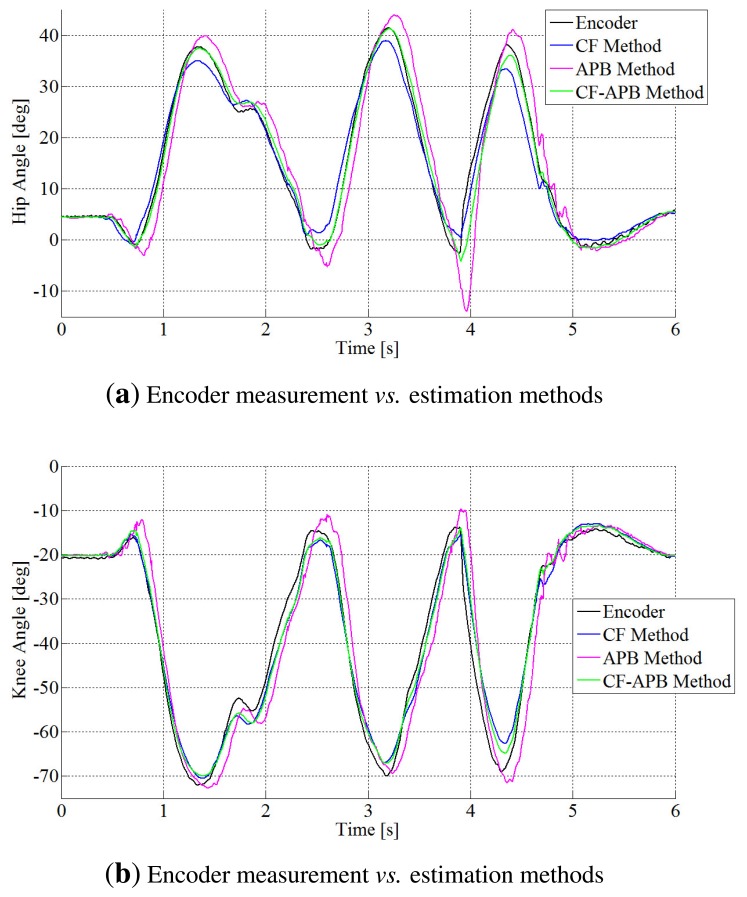
(a) Comparison between acceleration propagation-based method (APB), complementary filter (CF) and CF-APB performances vs. encoder measurement for hip angle estimation. (b) Comparison between APB, CF and CF-APB performances vs. encoder measurement for knee angle estimation.
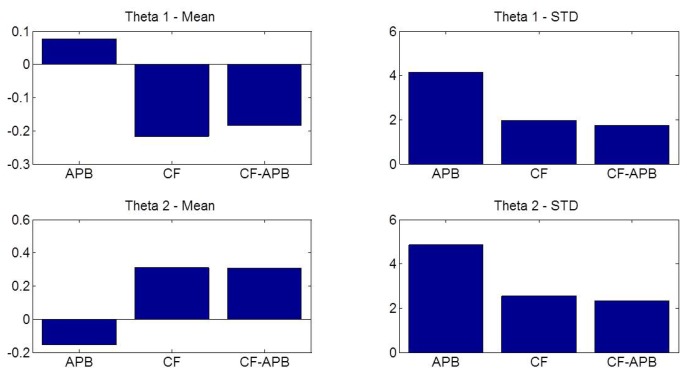
Statistic comparison between APB, CF and both bound together (CF-APB).
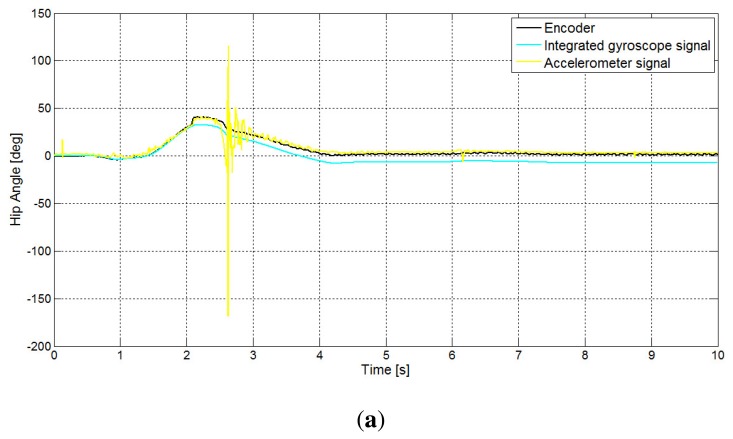
The integrated gyroscope signal and the accelerometer-based position estimation: (a) hip angle; (b) knee angle.
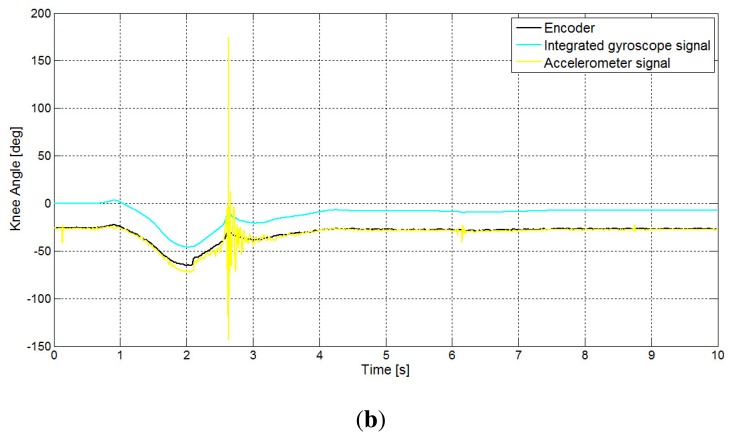
The integrated gyroscope signal and the accelerometer-based position estimation: (a) hip angle; (b) knee angle.
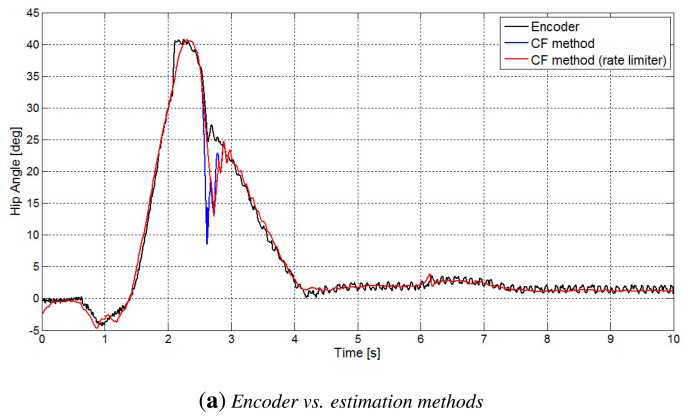
Estimation of the angles by means of the CF method vs. encoder measurement: (a) hip angle; (b) particulars of the hip angle estimation; (c) knee angle; (d) particulars of the knee angle estimation.
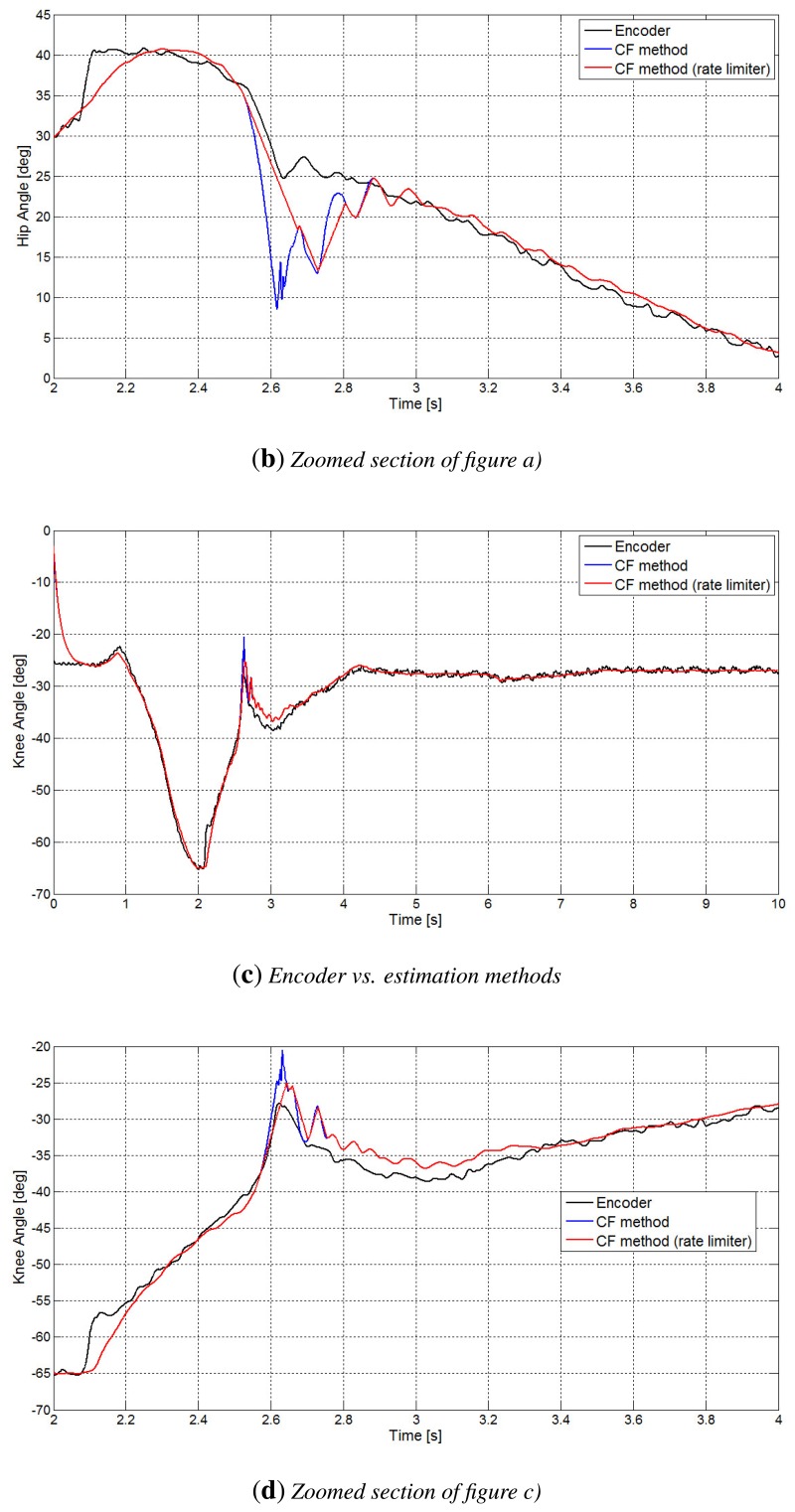
Estimation of the angles by means of the CF method vs. encoder measurement: (a) hip angle; (b) particulars of the hip angle estimation; (c) knee angle; (d) particulars of the knee angle estimation.
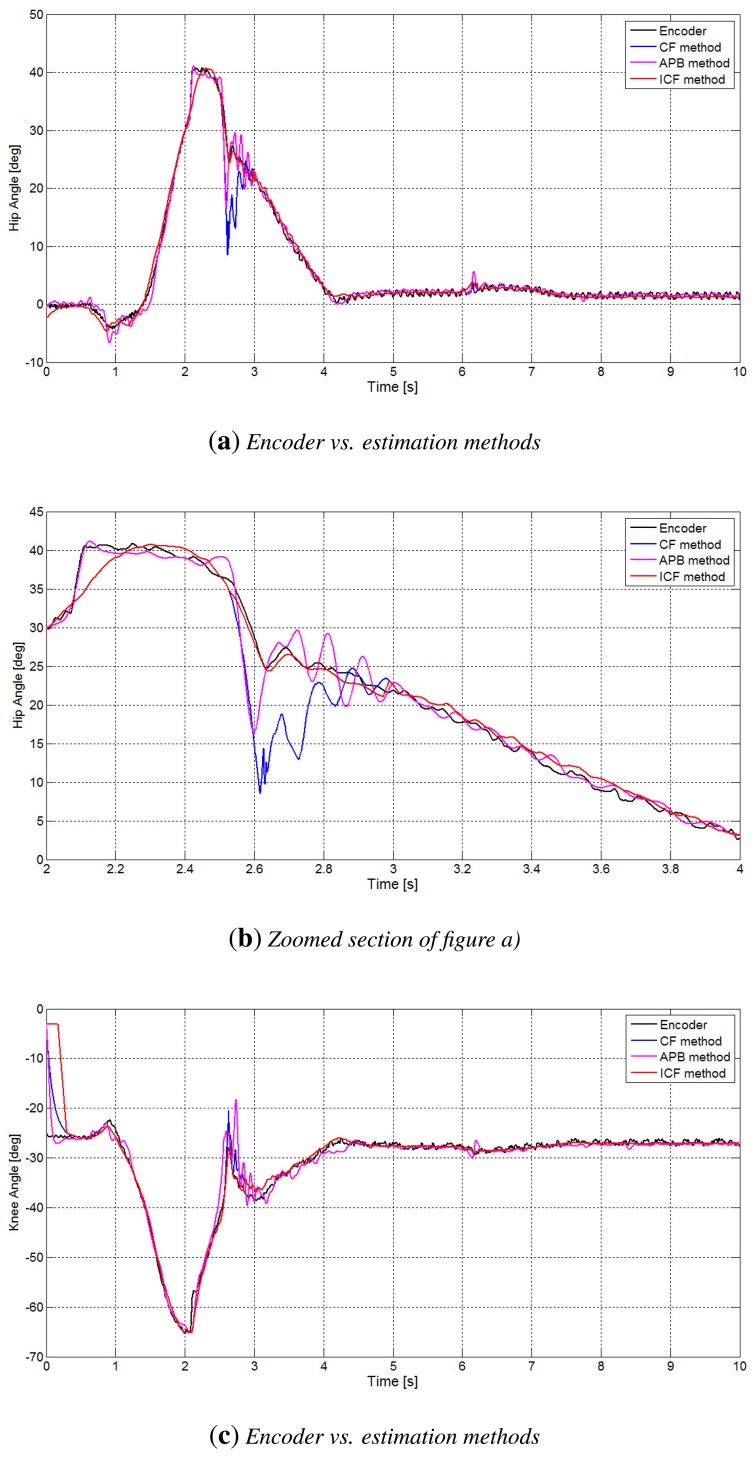
Comparison between the APB, CF and intelligent complementary filter (ICF) methods vs. encoder measurement: (a) hip angle estimation; (b) particulars of the comparison between estimation methods for the hip angle; (c) knee angle estimation; (d) particulars of the comparison between estimation methods for the knee angle.
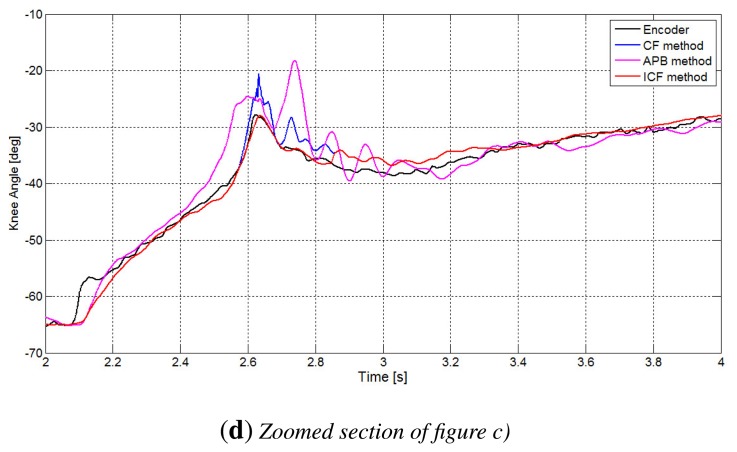
Comparison between the APB, CF and intelligent complementary filter (ICF) methods vs. encoder measurement: (a) hip angle estimation; (b) particulars of the comparison between estimation methods for the hip angle; (c) knee angle estimation; (d) particulars of the comparison between estimation methods for the knee angle.
References
-
- Casadio M., Morasso P.G., Sanguineti V. Direct measurement of ankle fness during quiet standing: Implications for control modeling and clinical application. Gait Posture. 2005;21:410–424. - PubMed
-
- Chacon-Murguia M.I., Sandoval-Rodriguez R., Arias-Enriquez O. Human Gait Feature Extraction Including a Kinematic Analysis Toward Robotic Power Assistance. Int. J. Adv. Robot. Syst. 2012;9:68–76.
-
- Santhiranayagam B.K., Lai D., Shilton A., Begg R., Palaniswami M. Regression Models for Estimation Gait Parameters Using Inertial Sensors. Proceedings of the 2011 Seventh International Conference on Intelligent Sensors, Sensor Networks & Information Processing (ISSNIP); Adelaide, Australia. 6–9 December 2011; pp. 46–51.
-
- Morris J.R.W. Accelerometry—A technique for the measurement of human body movements. J. Biomech. 1973;6:729–736. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
