

Benchmarking of dynamic simulation predictions in two software platforms using an upper limb musculoskeletal model
- PMID: 24995410
- PMCID: PMC4282829
- DOI: 10.1080/10255842.2014.916698
Benchmarking of dynamic simulation predictions in two software platforms using an upper limb musculoskeletal model
Abstract
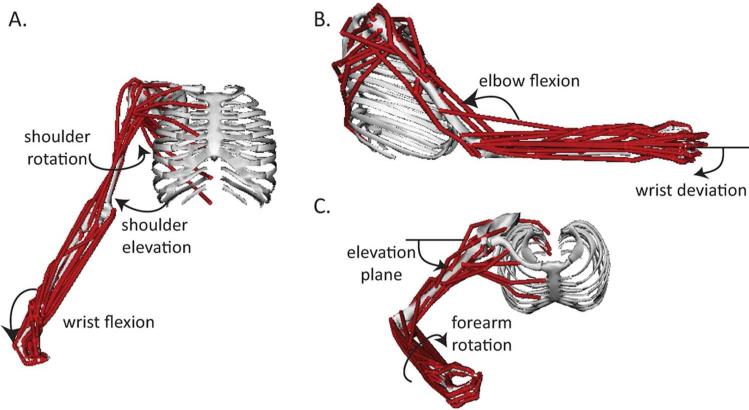
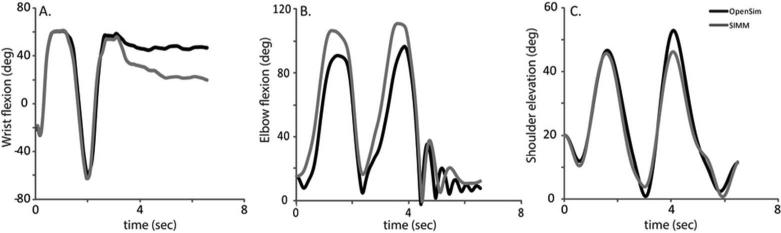
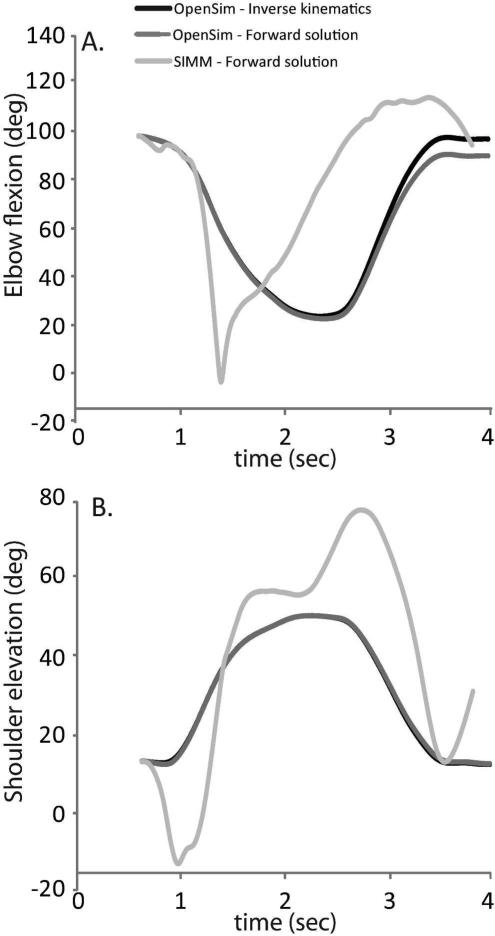
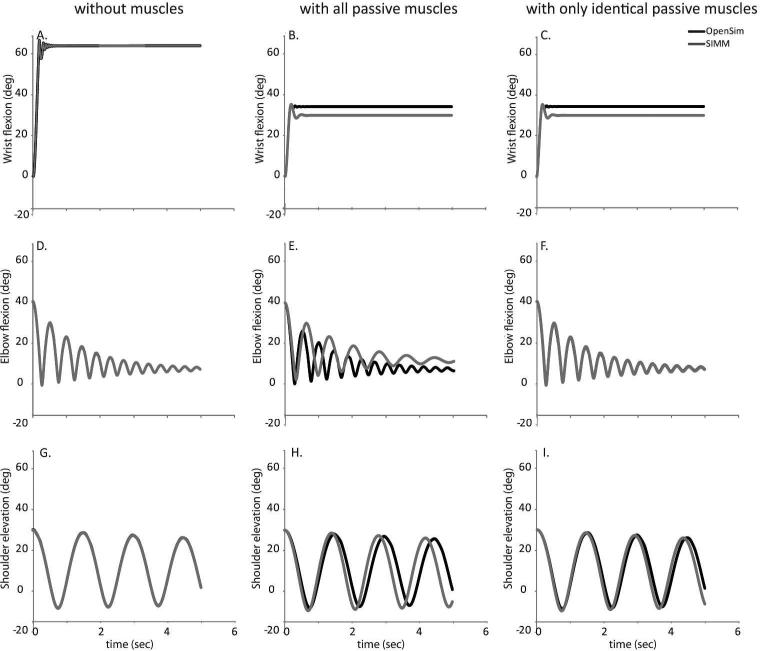
Several opensource or commercially available software platforms are widely used to develop dynamic simulations of movement. While computational approaches are conceptually similar across platforms, technical differences in implementation may influence output. We present a new upper limb dynamic model as a tool to evaluate potential differences in predictive behavior between platforms. We evaluated to what extent differences in technical implementations in popular simulation software environments result in differences in kinematic predictions for single and multijoint movements using EMG- and optimization-based approaches for deriving control signals. We illustrate the benchmarking comparison using SIMM-Dynamics Pipeline-SD/Fast and OpenSim platforms. The most substantial divergence results from differences in muscle model and actuator paths. This model is a valuable resource and is available for download by other researchers. The model, data, and simulation results presented here can be used by future researchers to benchmark other software platforms and software upgrades for these two platforms.
Keywords: biomechanics; computational modeling; medical computing; musculoskeletal; neuromuscular.
Figures
References
-
- Buchanan TS, Delp SL, Solbeck JA. Muscular resistance to varus and valgus loads at the elbow. J Biomech Eng. 1998 Oct;120:634–639. Epub 1999/07/21. - PubMed
-
- Clauser CE, McConville JT, Young JW. Weight, volume, and center of mass of segments of the human body. Dayton, OH.: 1969.
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources