

Clinical validation of robot simulation of toothbrushing--comparative plaque removal efficacy
- PMID: 24996973
- PMCID: PMC4094541
- DOI: 10.1186/1472-6831-14-82
Clinical validation of robot simulation of toothbrushing--comparative plaque removal efficacy
Abstract
Background: Clinical validation of laboratory toothbrushing tests has important advantages. It was, therefore, the aim to demonstrate correlation of tooth cleaning efficiency of a new robot brushing simulation technique with clinical plaque removal.
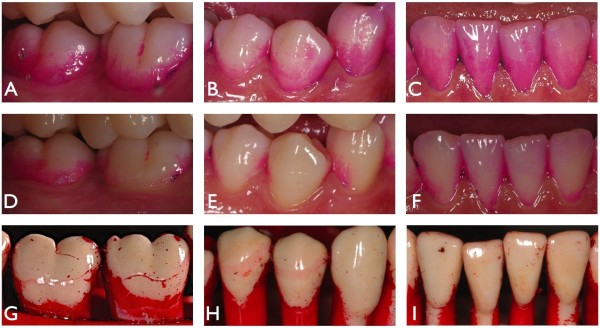
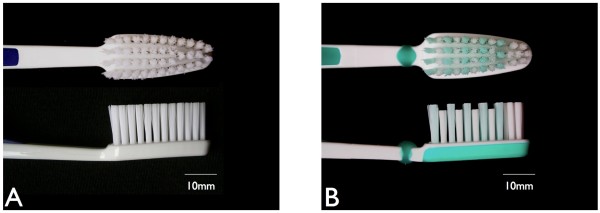
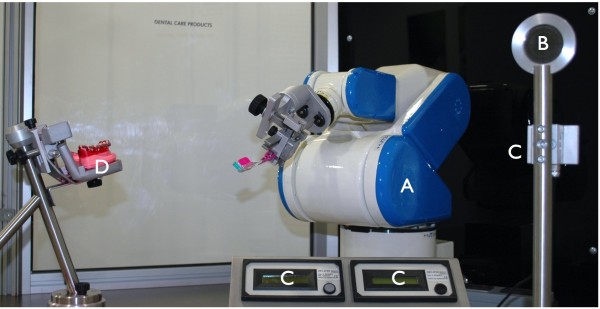
Methods: Clinical programme: 27 subjects received dental cleaning prior to 3-day-plaque-regrowth-interval. Plaque was stained, photographically documented and scored using planimetrical index. Subjects brushed teeth 33-47 with three techniques (horizontal, rotating, vertical), each for 20s buccally and for 20s orally in 3 consecutive intervals. The force was calibrated, the brushing technique was video supported. Two different brushes were randomly assigned to the subject. Robot programme: Clinical brushing programmes were transfered to a 6-axis-robot. Artificial teeth 33-47 were covered with plaque-simulating substrate. All brushing techniques were repeated 7 times, results were scored according to clinical planimetry. All data underwent statistical analysis by t-test, U-test and multivariate analysis.
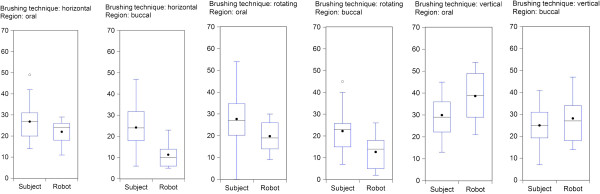
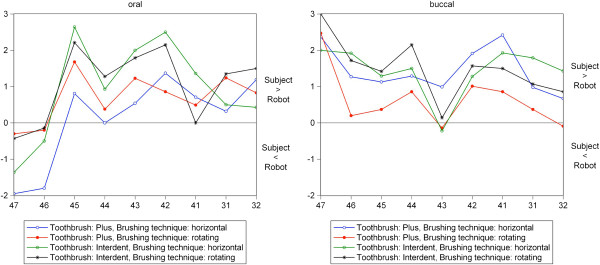
Results: The individual clinical cleaning patterns are well reproduced by the robot programmes. Differences in plaque removal are statistically significant for the two brushes, reproduced in clinical and robot data. Multivariate analysis confirms the higher cleaning efficiency for anterior teeth and for the buccal sites.
Conclusions: The robot tooth brushing simulation programme showed good correlation with clinically standardized tooth brushing.This new robot brushing simulation programme can be used for rapid, reproducible laboratory testing of tooth cleaning.
Figures
Similar articles
-
Video instruction to establish a panel of experts to compare tooth cleaning by 4 electric toothbrushes.J Clin Periodontol. 2001 Oct;28(10):917-22. doi: 10.1034/j.1600-051x.2001.028010917.x. J Clin Periodontol. 2001. PMID: 11686809 Clinical Trial.
-
Brush head wear, subject-perceived and laboratory cleaning performance of two oscillating-rotating electric toothbrush heads over 3 months.Am J Dent. 2012 Apr;25(2):84-90. Am J Dent. 2012. PMID: 22779281 Clinical Trial.
-
Laboratory evaluations of elmex inter X toothbrushes for interproximal access efficacy and posterior tooth surface cleaning.J Clin Dent. 2002;13(6):249-52. J Clin Dent. 2002. PMID: 12518499
-
Comparative professional plaque removal study using 8 branded toothbrushes.J Clin Periodontol. 2002 Apr;29(4):310-6. doi: 10.1034/j.1600-051x.2002.290406.x. J Clin Periodontol. 2002. PMID: 11966928 Clinical Trial.
-
Effect of brushing force and time on plaque removal using a powered toothbrush.J Clin Periodontol. 2003 May;30(5):409-13. doi: 10.1034/j.1600-051x.2003.20008.x. J Clin Periodontol. 2003. PMID: 12716332 Clinical Trial.
Cited by
-
Associations of oral hygiene with incident hypertension and type 2 diabetes mellitus: A population based cohort study in Southwest China.J Clin Hypertens (Greenwich). 2022 Apr;24(4):483-492. doi: 10.1111/jch.14451. Epub 2022 Mar 7. J Clin Hypertens (Greenwich). 2022. PMID: 35255181 Free PMC article.
-
[Recent progress of robots in stomatology].Hua Xi Kou Qiang Yi Xue Za Zhi. 2020 Feb 1;38(1):90-94. doi: 10.7518/hxkq.2020.01.016. Hua Xi Kou Qiang Yi Xue Za Zhi. 2020. PMID: 32037773 Free PMC article. Chinese.
-
Meta-analysis on the association between the frequency of tooth brushing and hypertension risk.J Clin Hypertens (Greenwich). 2022 Jun;24(6):689-697. doi: 10.1111/jch.14498. Epub 2022 May 31. J Clin Hypertens (Greenwich). 2022. PMID: 35641122 Free PMC article.
-
A Study on the Biofilm Removal Efficacy of a Bioelectric Toothbrush.Bioengineering (Basel). 2023 Oct 13;10(10):1184. doi: 10.3390/bioengineering10101184. Bioengineering (Basel). 2023. PMID: 37892914 Free PMC article.
-
Impact of manual toothbrush design on plaque removal efficacy.BMC Oral Health. 2023 Oct 25;23(1):796. doi: 10.1186/s12903-023-03518-6. BMC Oral Health. 2023. PMID: 37880662 Free PMC article.
References
-
- Arnold M, Trost G. Über die Abhängigkeit des Putzeffektes von verschieden Formen des Bürstenkopfes. Dtsch Stomatol. 1972;22:46–53. - PubMed
-
- Nygaard-Østby P, Edwardsen S, Spydevold B. Access to interproximal tooth surfaces by different bristle designs and stiffness of toothbrushes. Scan J Dent Res. 1979;87:424–430. - PubMed
-
- Rawls HR, Smith NK, Lentz DL, Cobb GW. Interproximal penetration of commercial toothbrushes as determined by static and dynamic tests using recommened brushing techniques. J Clin Dent. 1993;4:88–95.
-
- Volpenhein DW, Walsh MD, Dellermann PA, Burkett TA. A new method for in vitro evaluation of the interproximal penetration of manual toothbrushes. J Clin Dent. 1994;5:27–33. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
