

Towards active tracking of beating heart motion in the presence of arrhythmia for robotic assisted beating heart surgery
- PMID: 25048462
- PMCID: PMC4105597
- DOI: 10.1371/journal.pone.0102877
Towards active tracking of beating heart motion in the presence of arrhythmia for robotic assisted beating heart surgery
Abstract
In robotic assisted beating heart surgery, the control architecture for heart motion tracking has stringent requirements in terms of bandwidth of the motion that needs to be tracked. In order to achieve sufficient tracking accuracy, feed-forward control algorithms, which rely on estimations of upcoming heart motion, have been proposed in the literature. However, performance of these feed-forward motion control algorithms under heart rhythm variations is an important concern. In their past work, the authors have demonstrated the effectiveness of a receding horizon model predictive control-based algorithm, which used generalized adaptive predictors, under constant and slowly varying heart rate conditions. This paper extends these studies to the case when the heart motion statistics change abruptly and significantly, such as during arrhythmias. A feasibility study is carried out to assess the motion tracking capabilities of the adaptive algorithms in the occurrence of arrhythmia during beating heart surgery. Specifically, the tracking performance of the algorithms is evaluated on prerecorded motion data, which is collected in vivo and includes heart rhythm irregularities. The algorithms are tested using both simulations and bench experiments on a three degree-of-freedom robotic test bed. They are also compared with a position-plus-derivative controller as well as a receding horizon model predictive controller that employs an extended Kalman filter algorithm for predicting future heart motion.
Conflict of interest statement
Figures
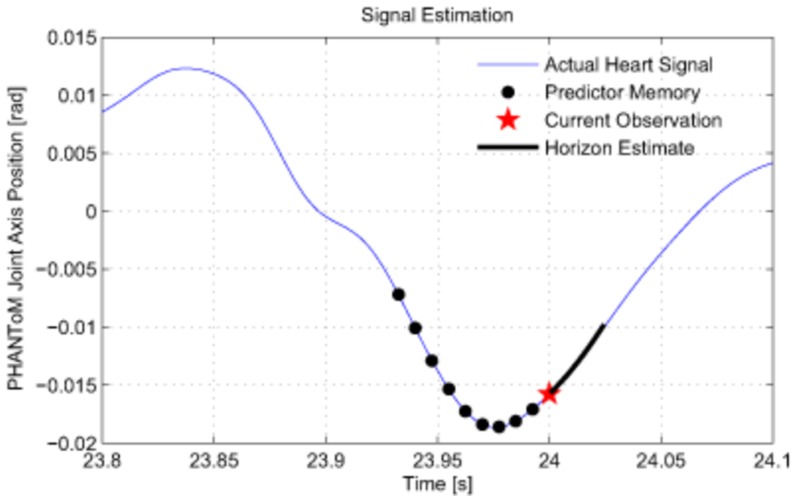
 is the current observation, and the short curve originating from there is the horizon estimate. The predictor takes the past observations and produces the horizon estimate from past observations.
is the current observation, and the short curve originating from there is the horizon estimate. The predictor takes the past observations and produces the horizon estimate from past observations.
Similar articles
-
Heart Motion Prediction Based on Adaptive Estimation Algorithms for Robotic Assisted Beating Heart Surgery.IEEE Trans Robot. 2013 Feb 1;29(1):261-276. doi: 10.1109/TRO.2012.2217676. IEEE Trans Robot. 2013. PMID: 23976889 Free PMC article.
-
Motion prediction for tracking the beating heart.Annu Int Conf IEEE Eng Med Biol Soc. 2008;2008:3261-4. doi: 10.1109/IEMBS.2008.4649900. Annu Int Conf IEEE Eng Med Biol Soc. 2008. PMID: 19163403
-
Localization of Point-of-Interest Positions on Cardiac Surface for Robotic-Assisted Beating Heart Surgery.Annu Int Conf IEEE Eng Med Biol Soc. 2021 Nov;2021:4566-4569. doi: 10.1109/EMBC46164.2021.9630917. Annu Int Conf IEEE Eng Med Biol Soc. 2021. PMID: 34892232 Free PMC article.
-
Motion estimation in beating heart surgery.IEEE Trans Biomed Eng. 2005 Oct;52(10):1729-40. doi: 10.1109/TBME.2005.855716. IEEE Trans Biomed Eng. 2005. PMID: 16235658
-
Robotic cardiac surgery.Int J Med Robot. 2006 Sep;2(3):225-32. doi: 10.1002/rcs.98. Int J Med Robot. 2006. PMID: 17520636 Review.
Cited by
-
Deformable cardiac surface tracking by adaptive estimation algorithms.Sci Rep. 2023 Jan 25;13(1):1387. doi: 10.1038/s41598-023-28578-0. Sci Rep. 2023. PMID: 36697497 Free PMC article.
-
Beating Heart Motion Accurate Prediction Method Based on Interactive Multiple Model: An Information Fusion Approach.Biomed Res Int. 2017;2017:1279486. doi: 10.1155/2017/1279486. Epub 2017 Oct 15. Biomed Res Int. 2017. PMID: 29124062 Free PMC article.
-
Contact Stability and Contact Safety of a Magnetic Resonance Imaging-Guided Robotic Catheter Under Heart Surface Motion.J Dyn Syst Meas Control. 2021 Jul 1;143(7):071010. doi: 10.1115/1.4049837. Epub 2021 Feb 23. J Dyn Syst Meas Control. 2021. PMID: 33994580 Free PMC article.
-
Cardioscopic Tool-delivery Instrument for Beating-heart Surgery.IEEE ASME Trans Mechatron. 2016 Feb;21(1):584-590. doi: 10.1109/TMECH.2015.2494842. Epub 2015 Oct 26. IEEE ASME Trans Mechatron. 2016. PMID: 26951754 Free PMC article.
-
Contact Stability Analysis of Magnetically-Actuated Robotic Catheter Under Surface Motion.IEEE Int Conf Robot Autom. 2020 May-Aug;2020:4455-4462. doi: 10.1109/icra40945.2020.9196951. Epub 2020 Sep 15. IEEE Int Conf Robot Autom. 2020. PMID: 34123481 Free PMC article.
References
-
- Ginhoux R, Gangloff JA, DeMathelin MF, Soler L, Leroy J, et al. (2005) Active filtering of physiological motion in robotized surgery using predictive control. IEEE Trans Robot 21: 67–79.
-
- Richa R, Bo APL, Poignet P (2008) Motion prediction for tracking the beating heart. In: Proc. of the Annual International Conference of the Engineering in Medicine and Biology Society (EMBC). Vancouver, British Columbia, Canada, pp. 3261–3264. - PubMed
-
- Richa R, Bó AP, Poignet P (2011) Towards robust 3d visual tracking for motion compensation in beating heart surgery. Medical Image Analysis 15: 302–315. - PubMed
-
- Bachta W, Renaud P, Cuvillon L, Laroche E, Forgione A, et al. (2009) Motion prediction for computer-assisted beating heart surgery. IEEE Trans Biomed Eng 56: 2551–63. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
Miscellaneous
