

Task-specific stability in muscle activation space during unintentional movements
- PMID: 25092272
- PMCID: PMC4199912
- DOI: 10.1007/s00221-014-4048-0
Task-specific stability in muscle activation space during unintentional movements
Abstract
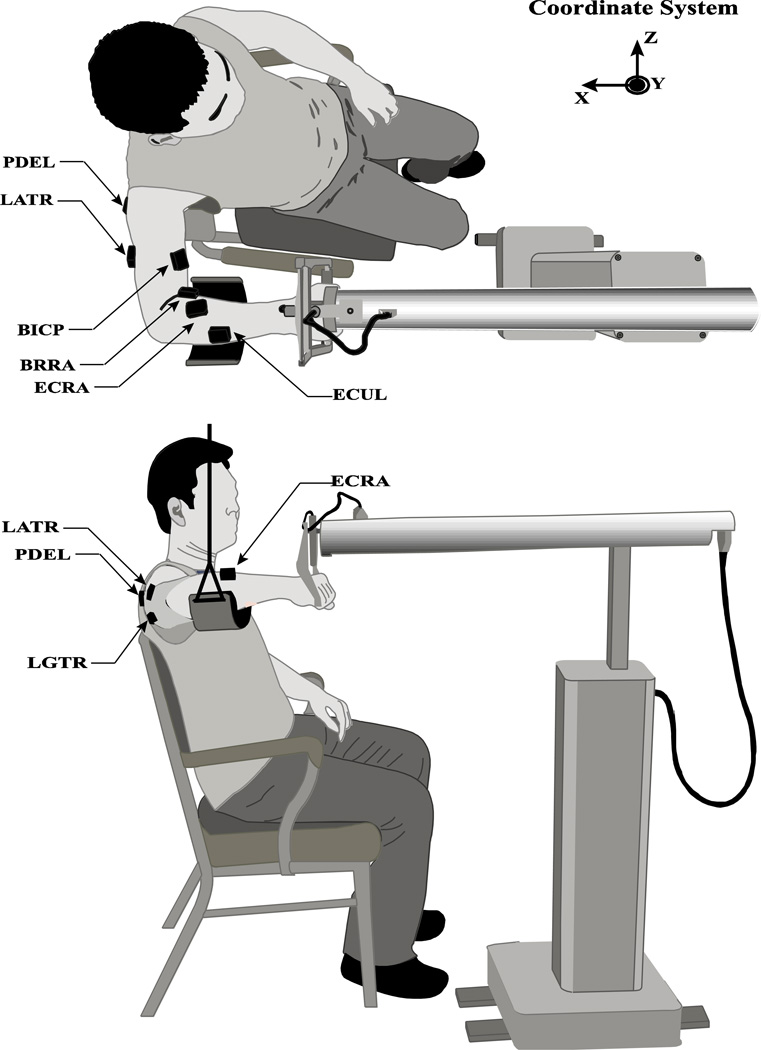
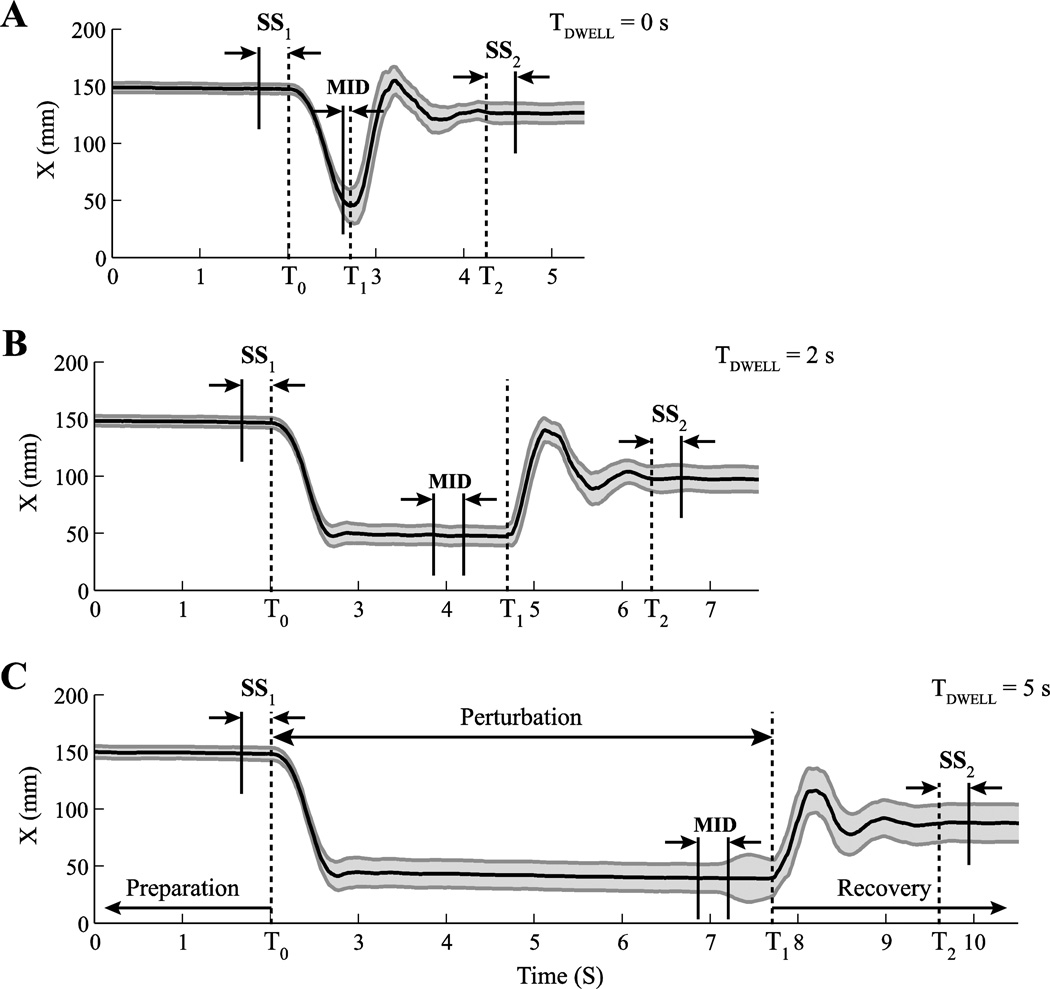
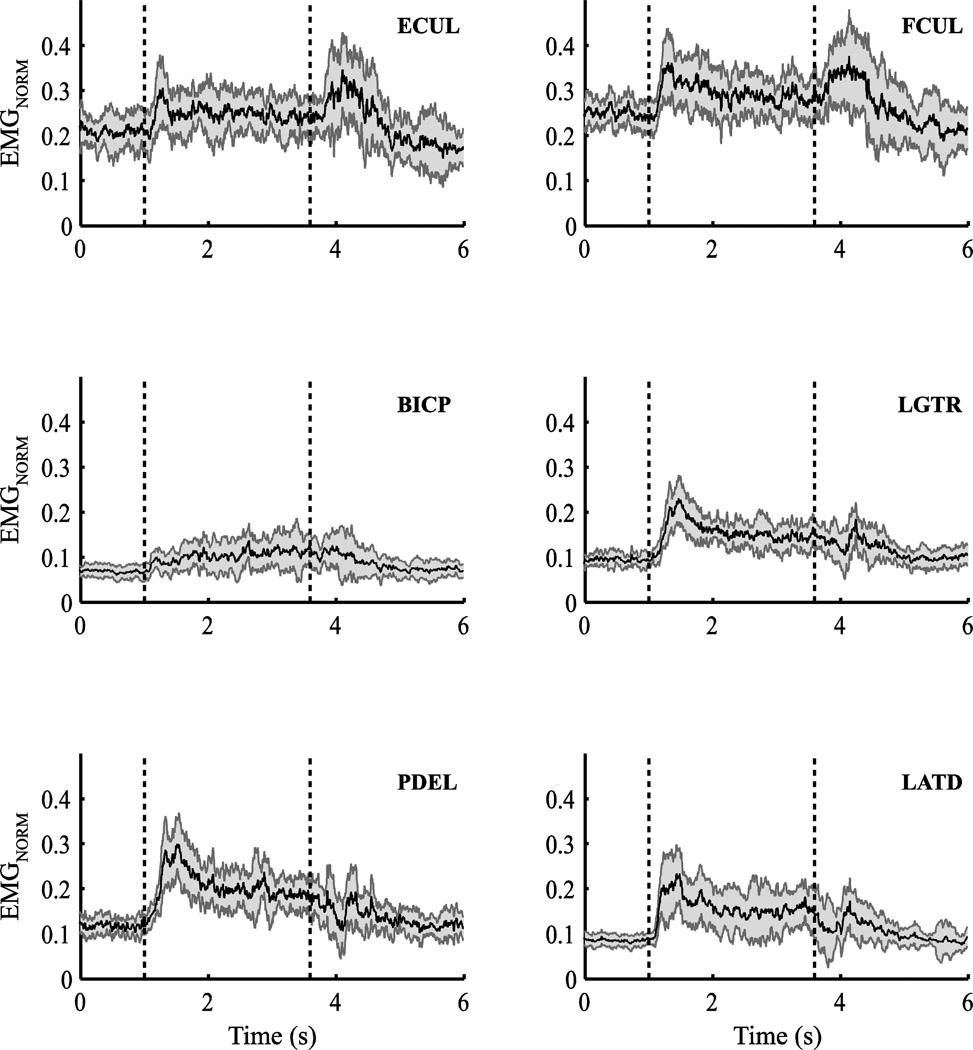
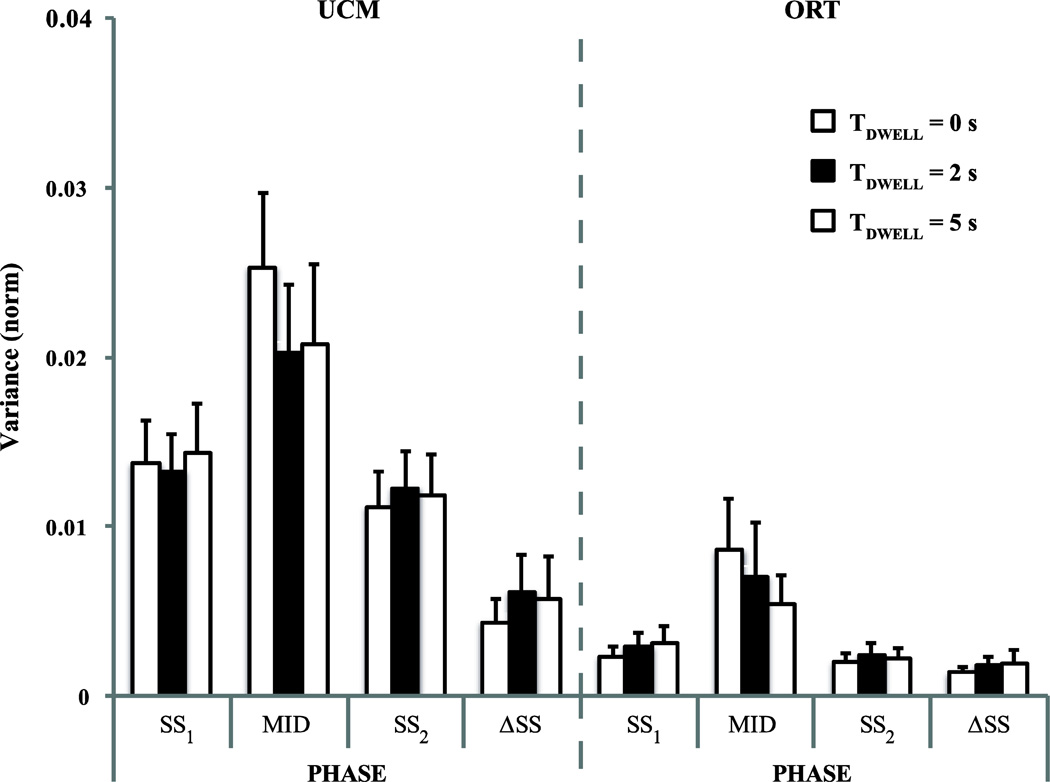
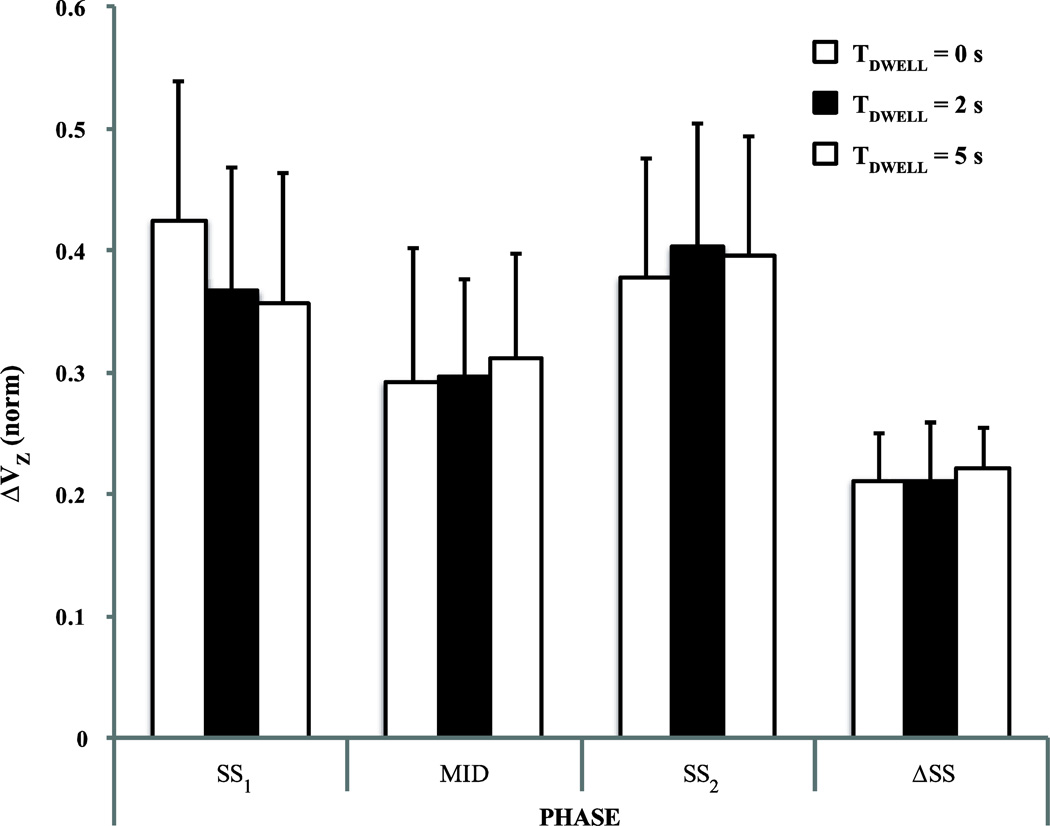
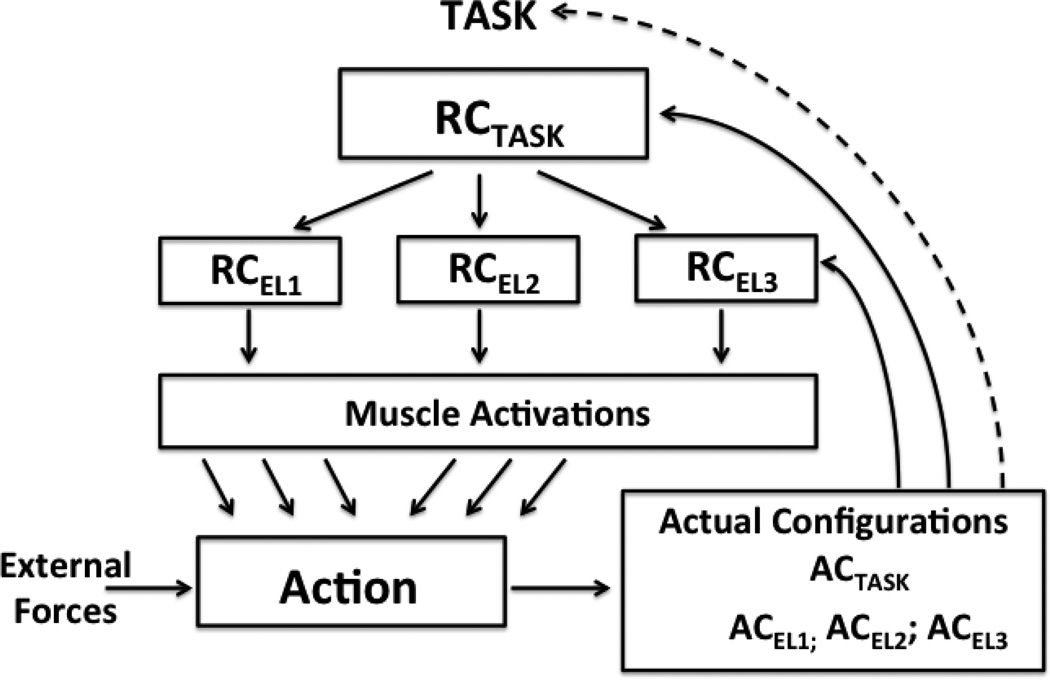
We used robot-generated perturbations applied during position-holding tasks to explore stability of induced unintentional movements in a multidimensional space of muscle activations. Healthy subjects held the handle of a robot against a constant bias force and were instructed not to interfere with hand movements produced by changes in the external force. Transient force changes were applied leading to handle displacement away from the initial position and then back toward the initial position. Intertrial variance in the space of muscle modes (eigenvectors in the muscle activations space) was quantified within two subspaces, corresponding to unchanged handle coordinate and to changes in the handle coordinate. Most variance was confined to the former subspace in each of the three phases of movement, the initial steady state, the intermediate position, and the final steady state. The same result was found when the changes in muscle activation were analyzed between the initial and final steady states. Changes in the dwell time between the perturbation force application and removal led to different final hand locations undershooting the initial position. The magnitude of the undershot scaled with the dwell time, while the structure of variance in the muscle activation space did not depend on the dwell time. We conclude that stability of the hand coordinate is ensured during both intentional and unintentional actions via similar mechanisms. Relative equifinality in the external space after transient perturbations may be associated with varying states in the redundant space of muscle activations. The results fit a hierarchical scheme for the control of voluntary movements with referent configurations and redundant mapping between the levels of the hierarchy.
Figures
Similar articles
-
Intentional and unintentional multi-joint movements: their nature and structure of variance.Neuroscience. 2015 Mar 19;289:181-93. doi: 10.1016/j.neuroscience.2014.12.079. Epub 2015 Jan 14. Neuroscience. 2015. PMID: 25596318 Free PMC article.
-
Unintentional movements produced by back-coupling between the actual and referent body configurations: violations of equifinality in multi-joint positional tasks.Exp Brain Res. 2014 Dec;232(12):3847-59. doi: 10.1007/s00221-014-4059-x. Epub 2014 Aug 24. Exp Brain Res. 2014. PMID: 25150552 Free PMC article.
-
Characteristics of unintentional movements by a multijoint effector.J Mot Behav. 2015;47(4):352-61. doi: 10.1080/00222895.2014.986045. Epub 2015 Jan 7. J Mot Behav. 2015. PMID: 25565394 Free PMC article.
-
Fifty Years of Physics of Living Systems.Adv Exp Med Biol. 2016;957:81-103. doi: 10.1007/978-3-319-47313-0_5. Adv Exp Med Biol. 2016. PMID: 28035561 Review.
-
Anticipatory muscle activations to coordinate balance and movement during motor transitions: A narrative review.Gait Posture. 2025 May;118:130-140. doi: 10.1016/j.gaitpost.2025.02.009. Epub 2025 Feb 11. Gait Posture. 2025. PMID: 39970571 Review.
Cited by
-
Unintentional movements induced by sequential transient perturbations in a multi-joint positional task.Hum Mov Sci. 2016 Apr;46:1-9. doi: 10.1016/j.humov.2015.12.002. Epub 2015 Dec 17. Hum Mov Sci. 2016. PMID: 26703914 Free PMC article.
-
Intentional and unintentional multi-joint movements: their nature and structure of variance.Neuroscience. 2015 Mar 19;289:181-93. doi: 10.1016/j.neuroscience.2014.12.079. Epub 2015 Jan 14. Neuroscience. 2015. PMID: 25596318 Free PMC article.
-
Anticipatory postural adjustments and anticipatory synergy adjustments: preparing to a postural perturbation with predictable and unpredictable direction.Exp Brain Res. 2017 Mar;235(3):713-730. doi: 10.1007/s00221-016-4835-x. Epub 2016 Nov 19. Exp Brain Res. 2017. PMID: 27866261 Free PMC article.
-
Unintentional changes in the apparent stiffness of the multi-joint limb.Exp Brain Res. 2015 Oct;233(10):2989-3004. doi: 10.1007/s00221-015-4369-7. Epub 2015 Jul 14. Exp Brain Res. 2015. PMID: 26169103 Free PMC article.
-
Positional errors introduced by transient perturbations applied to a multi-joint limb.Neurosci Lett. 2015 May 19;595:104-7. doi: 10.1016/j.neulet.2015.04.017. Epub 2015 Apr 13. Neurosci Lett. 2015. PMID: 25881483 Free PMC article.
References
-
- Bernstein NA. The co-ordination and regulation of movements. Oxford: Pergamon Press; 1967.
-
- Bizzi E, Polit A, Morasso P. Mechanisms underlying achievement of final head position. J Neurophysiol. 1976;39:435–444. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
