

Feasibility study of a hand guided robotic drill for cochleostomy
- PMID: 25110684
- PMCID: PMC4109386
- DOI: 10.1155/2014/656325
Feasibility study of a hand guided robotic drill for cochleostomy
Abstract
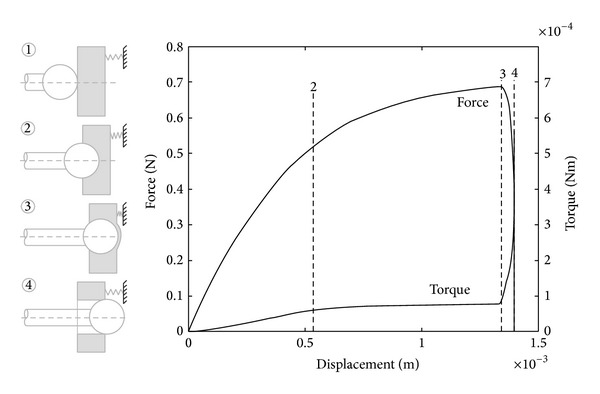
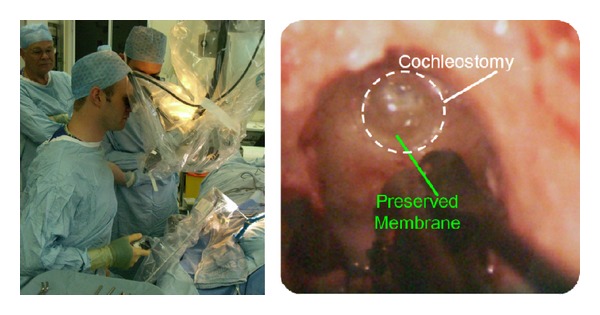
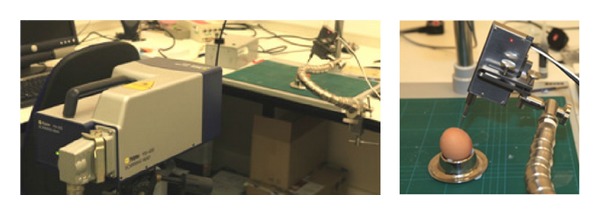
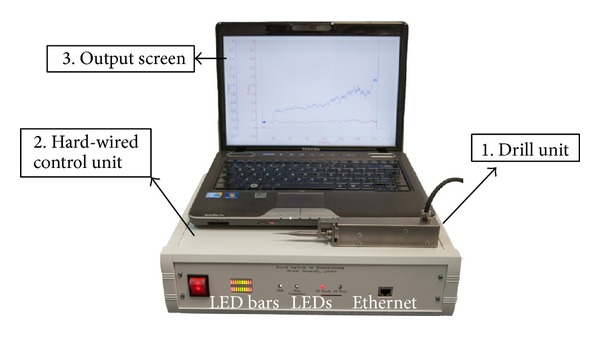
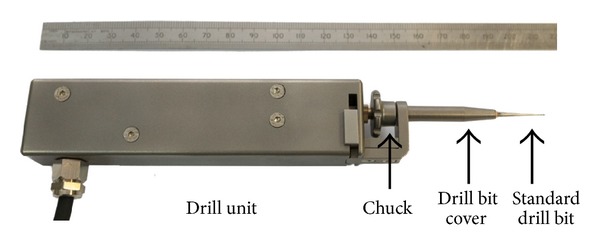
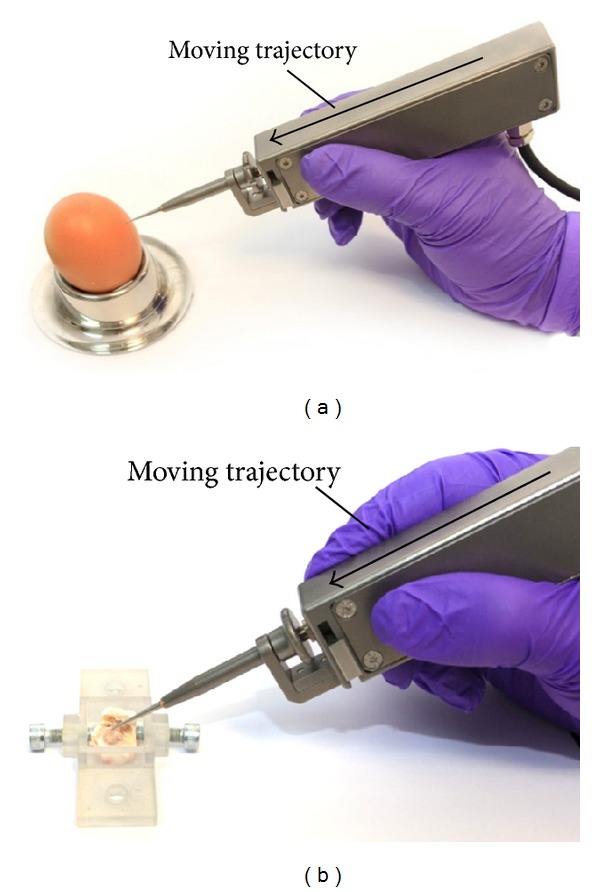
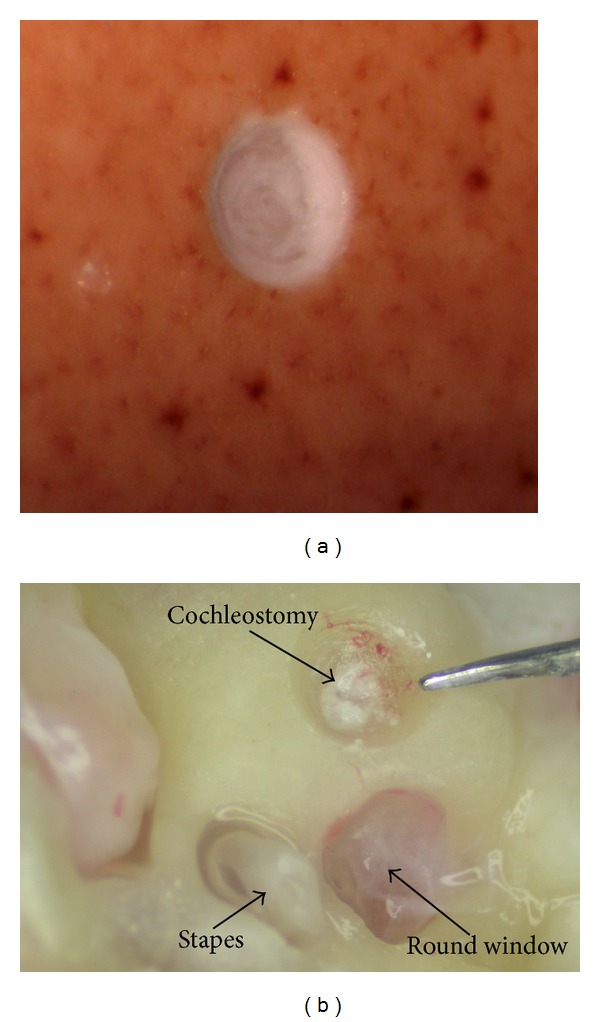
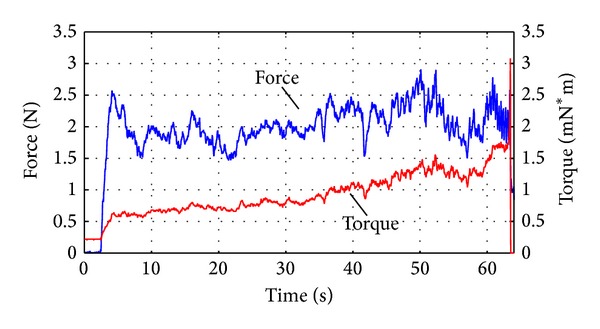
The concept of a hand guided robotic drill has been inspired by an automated, arm supported robotic drill recently applied in clinical practice to produce cochleostomies without penetrating the endosteum ready for inserting cochlear electrodes. The smart tactile sensing scheme within the drill enables precise control of the state of interaction between tissues and tools in real-time. This paper reports development studies of the hand guided robotic drill where the same consistent outcomes, augmentation of surgeon control and skill, and similar reduction of induced disturbances on the hearing organ are achieved. The device operates with differing presentation of tissues resulting from variation in anatomy and demonstrates the ability to control or avoid penetration of tissue layers as required and to respond to intended rather than involuntary motion of the surgeon operator. The advantage of hand guided over an arm supported system is that it offers flexibility in adjusting the drilling trajectory. This can be important to initiate cutting on a hard convex tissue surface without slipping and then to proceed on the desired trajectory after cutting has commenced. The results for trials on phantoms show that drill unit compliance is an important factor in the design.
Figures


References
-
- Cao T, Li X, Gao Z, Feng G, Shen P. Automatic identification of otological drilling faults: an intelligent recognition algorithm. The International Journal of Medical Robotics and Computer Assisted Surgery. 2010;6(2):231–238. - PubMed
-
- James C, Albegger K, Battmer R, et al. Preservation of residual hearing with cochlear implantation: how and why. Acta Oto-Laryngologica. 2005;125(5):481–491. - PubMed
-
- Zou J, Bretlau P, Pyykkö I, Starck J, Toppila E. Sensorineural hearing loss after vibration: an animal model for evaluating prevention and treatment of inner ear hearing loss. Acta Otolaryngologica. 2001;121(2):143–148. - PubMed
-
- Guthart GS, Salisbury KJ., Jr. Intuitive telesurgery system: overview and application. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA '00); April 2000; pp. 618–621.
-
- Jakopec M, Rodriguez y Baena F, Harris SJ, Gomes P, Cobb J, Davies BL. The hands-on orthopaedic robot “acrobot”: early clinical trials of total knee replacement surgery. IEEE Transactions on Robotics and Automation. 2003;19(5):902–911.
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
