

Accuracy and speed of material categorization in real-world images
- PMID: 25122216
- PMCID: PMC4132332
- DOI: 10.1167/14.9.12
Accuracy and speed of material categorization in real-world images
Abstract
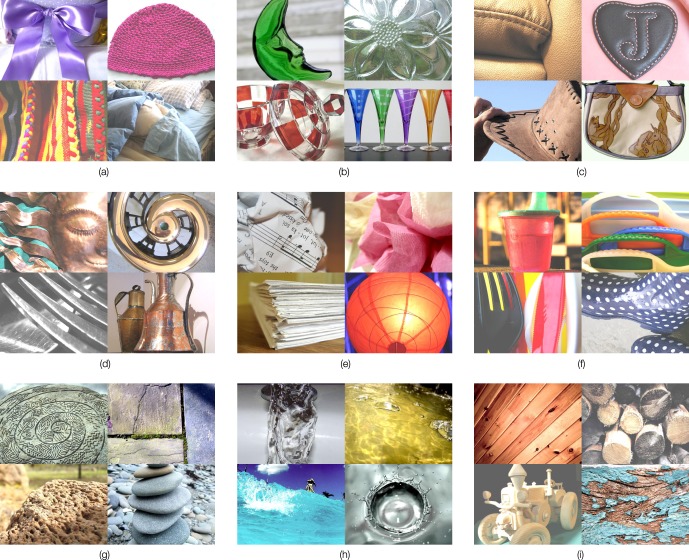
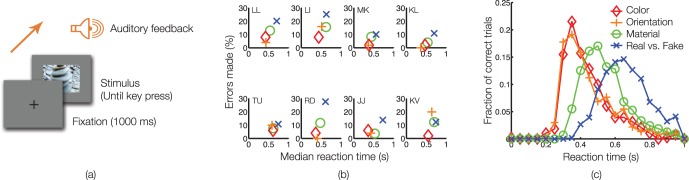
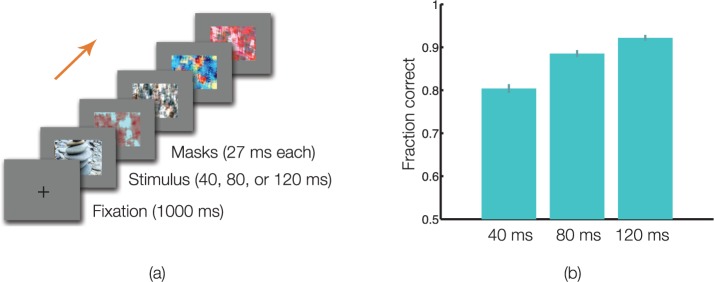
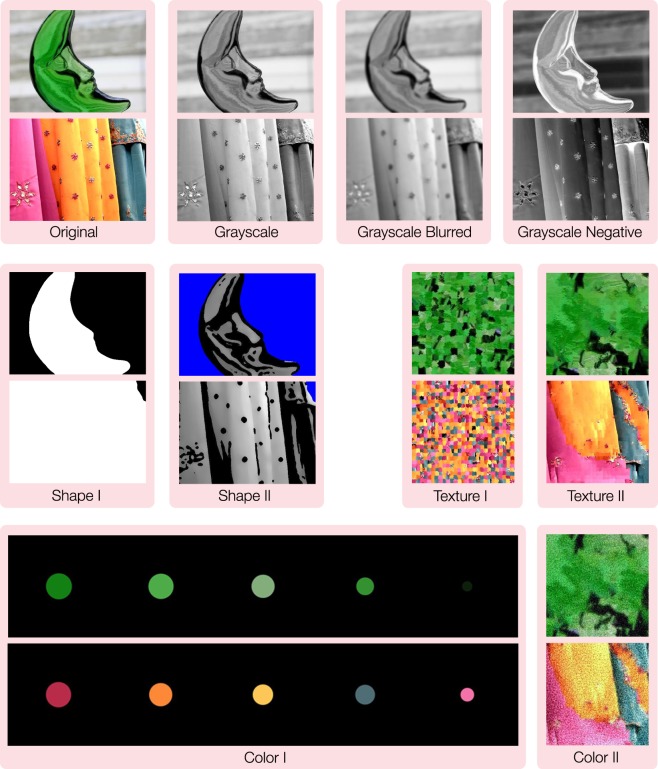
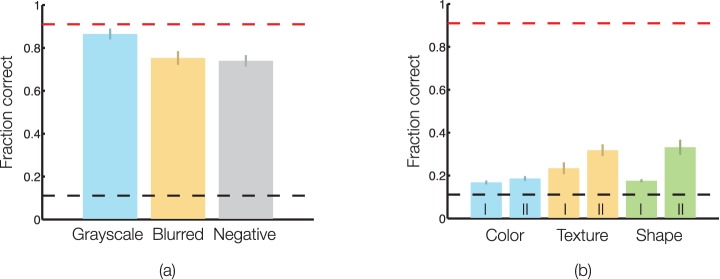
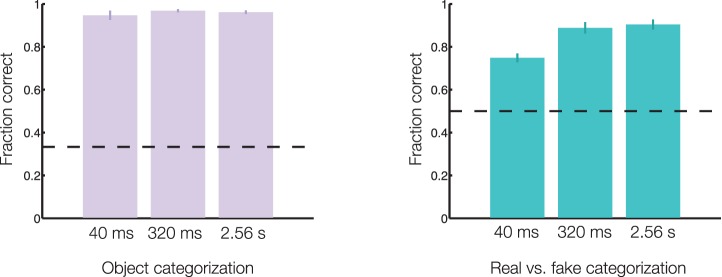
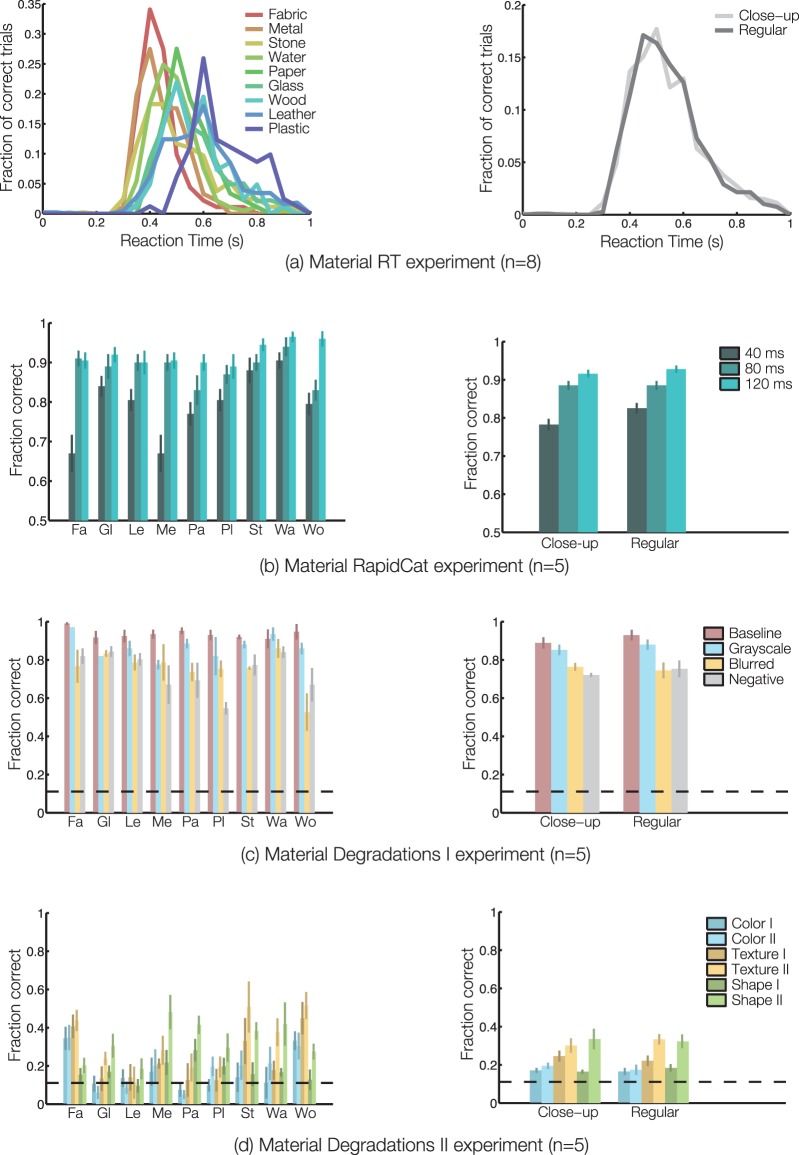
It is easy to visually distinguish a ceramic knife from one made of steel, a leather jacket from one made of denim, and a plush toy from one made of plastic. Most studies of material appearance have focused on the estimation of specific material properties such as albedo or surface gloss, and as a consequence, almost nothing is known about how we recognize material categories like leather or plastic. We have studied judgments of high-level material categories with a diverse set of real-world photographs, and we have shown (Sharan, 2009) that observers can categorize materials reliably and quickly. Performance on our tasks cannot be explained by simple differences in color, surface shape, or texture. Nor can the results be explained by observers merely performing shape-based object recognition. Rather, we argue that fast and accurate material categorization is a distinct, basic ability of the visual system.
Keywords: material categories; material perception; material properties; real-world stimuli.
© 2014 ARVO.
Figures



References
-
- Adelson E. H. (2001). On seeing stuff: The perception of materials by humans and machines. In B. E. Rogowitz & T. N. Pappas (Eds.), SPIE: Vol. 4299. Human vision and electronic imaging VI (pp. 1–12). doi:10.1117/12.784132 - DOI
-
- Adelson E. H. (2008). Image statistics and surface perception. In B. E. Rogowitz & T. N. Pappas (Eds.), Human vision and electronic imaging XIII, Vol. 6809 ( pp 1–9). doi:10.1117/12.784132 - DOI
-
- Anderson B. (2011). Visual perception of materials and surfaces. Current Biology, 21 (24), R978–R983 - PubMed
-
- Bacon-Mace N., Mace M. J., Fabre-Thorpe M., Thorpe S. J. (2005). The time course of visual processing: Backward masking and natural scene categorization. Vision Research, 45 (11), 1459–1469 - PubMed
-
- Barron J. T., Malik J. (2011). High-frequency shape and albedo from shading using natural image statistics. In IEEE conference on computer vision and pattern recognition (pp. 2521–2528). doi:10.1109/cvpr.2011.5995392. - DOI
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
