

Equilibrium Conformations of Concentric-tube Continuum Robots
- PMID: 25125773
- PMCID: PMC4129649
- DOI: 10.1177/0278364910367543
Equilibrium Conformations of Concentric-tube Continuum Robots
Abstract
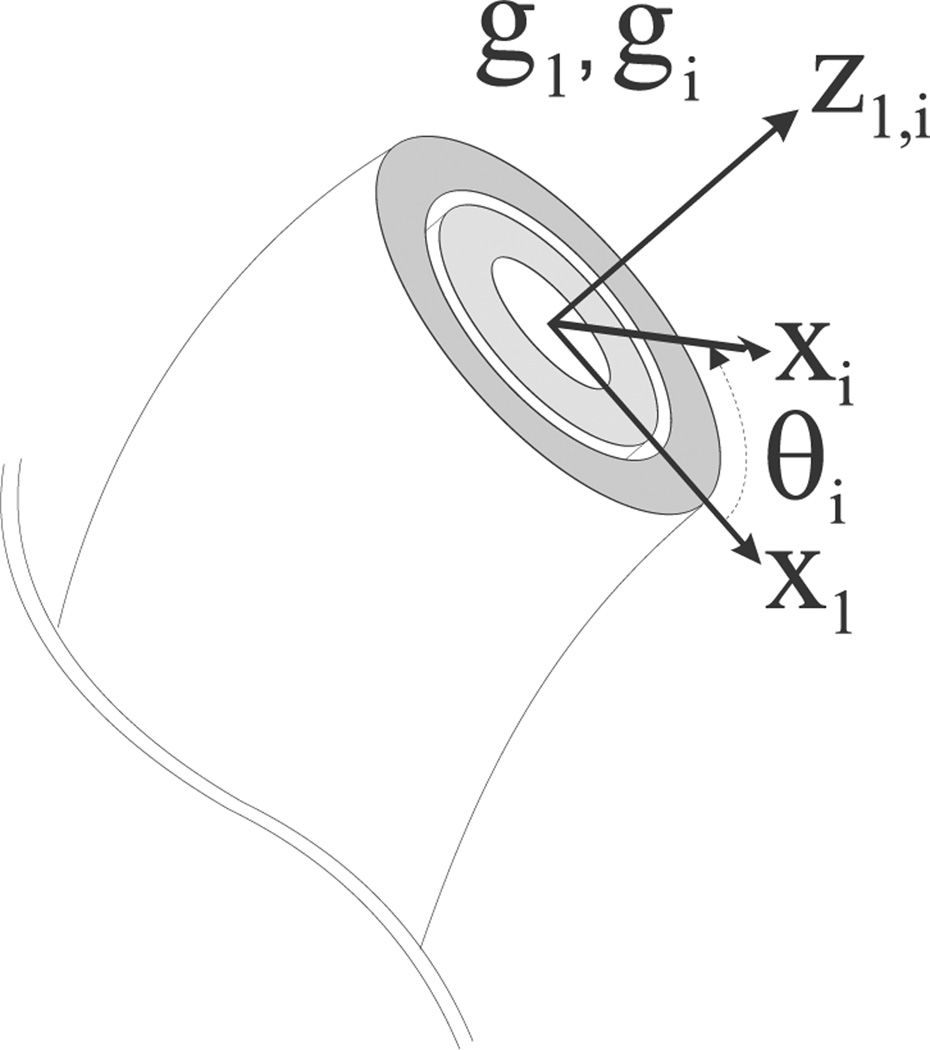
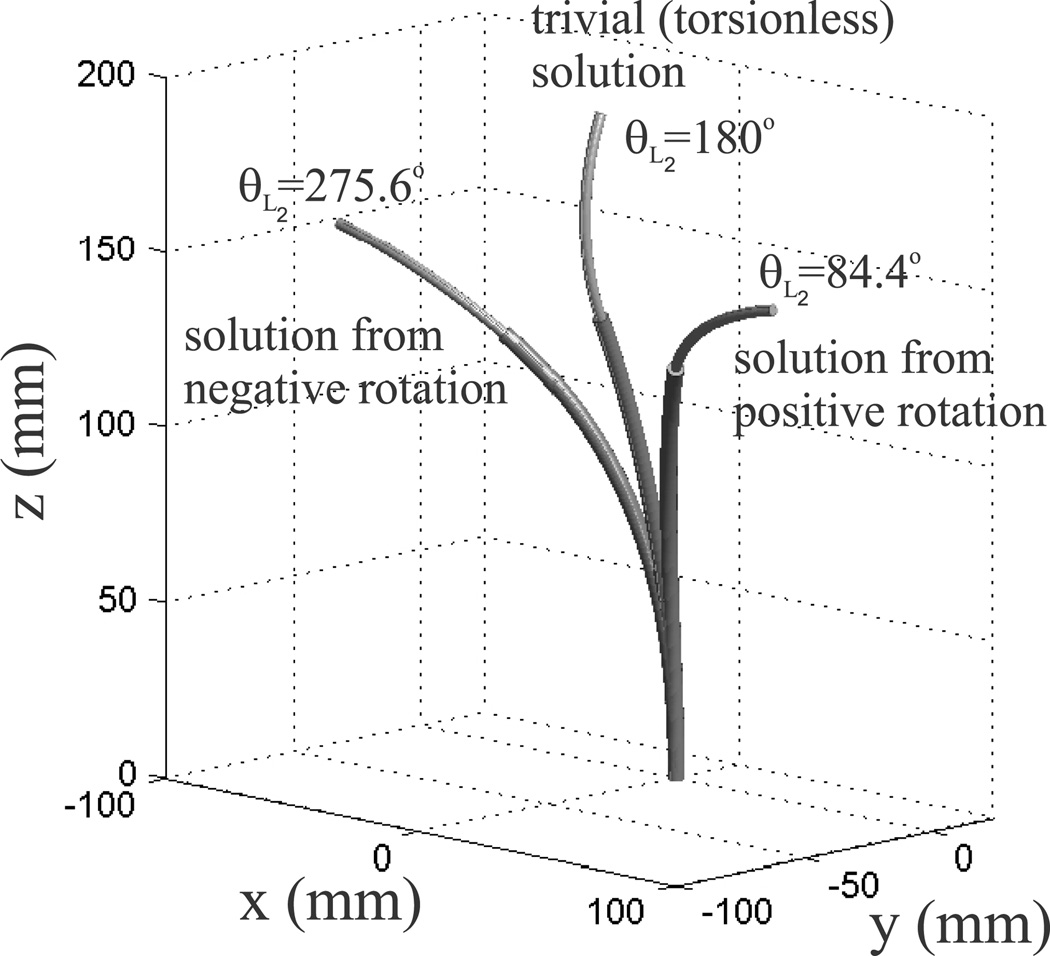
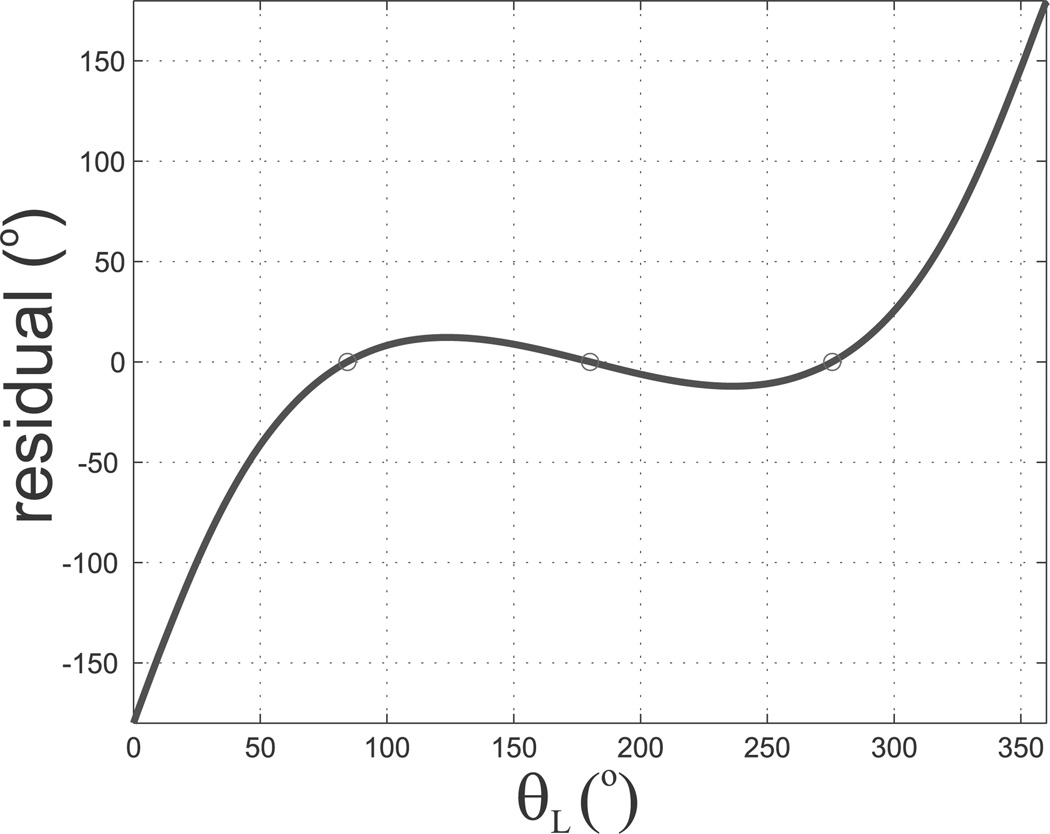
Robots consisting of several concentric, preshaped, elastic tubes can work dexterously in narrow, constrained, and/or winding spaces, as are commonly found in minimally invasive surgery. Previous models of these "active cannulas" assume piecewise constant precurvature of component tubes and neglect torsion in curved sections of the device. In this paper we develop a new coordinate-free energy formulation that accounts for general preshaping of an arbitrary number of component tubes, and which explicitly includes both bending and torsion throughout the device. We show that previously reported models are special cases of our formulation, and then explore in detail the implications of torsional flexibility for the special case of two tubes. Experiments demonstrate that this framework is more descriptive of physical prototype behavior than previous models; it reduces model prediction error by 82% over the calibrated bending-only model, and 17% over the calibrated transmissional torsion model in a set of experiments.
Keywords: active cannula; concentric tube robot; continuum robot; elastica; flexible arms; kinematics; mechanics; medical robots; snake-like robot; variational calculus.
Figures
References
-
- Alterovitz R, Goldberg K, Pouliot J, Taschereau R, Hsu I-C. Sensorless planning for medical needle insertion procedures. IEEE/RSJ International Conference on Intelligent Robots and Systems. 2003:3337–3343.
-
- Ames WF. Nonlinear Ordinary Equations in Transport Processes. New York: Academic Press; 1968.
-
- Antman SS. Nonlinear Problems of Elasticity. 2nd edition. New York: Springer; 2005.
-
- Arun KS, Huang TS, Blostein SD. Least-squares fitting of two 3-D point sets. IEEE Transactions on Pattern Analysis and Machine Intellegence. 1987;9(5):698–700. - PubMed
-
- Bergou M, Wardetzky M, Robinson S, Audoly B, Grinspun E. Discrete elastic rods. SIGGRAPH (ACM Transactions on Graphics) 2008;27:34–35.
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources