

Digit forces bias sensorimotor transformations underlying control of fingertip position
- PMID: 25136304
- PMCID: PMC4120687
- DOI: 10.3389/fnhum.2014.00564
Digit forces bias sensorimotor transformations underlying control of fingertip position
Abstract
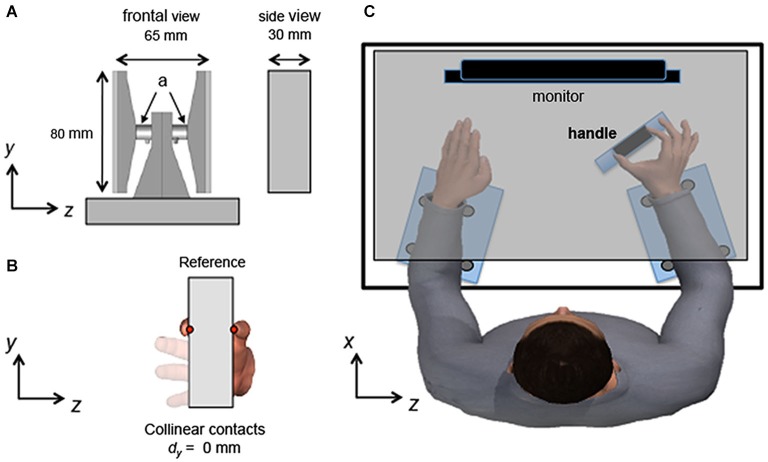
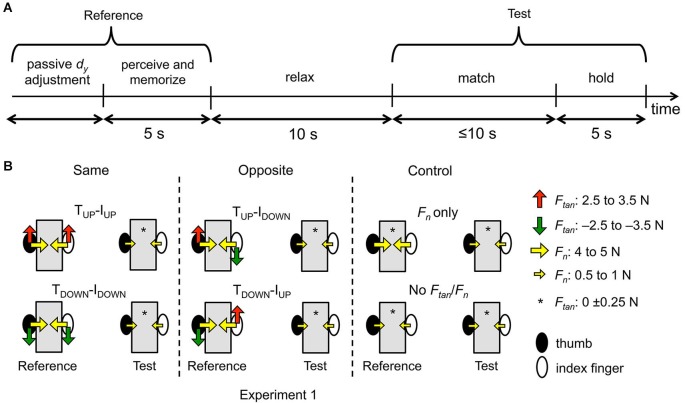
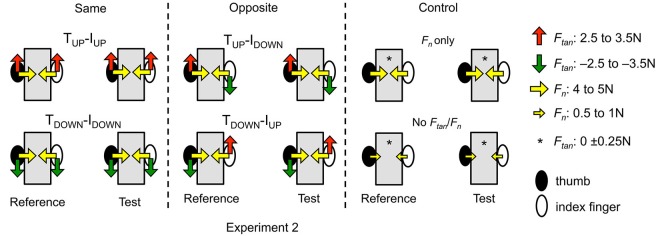
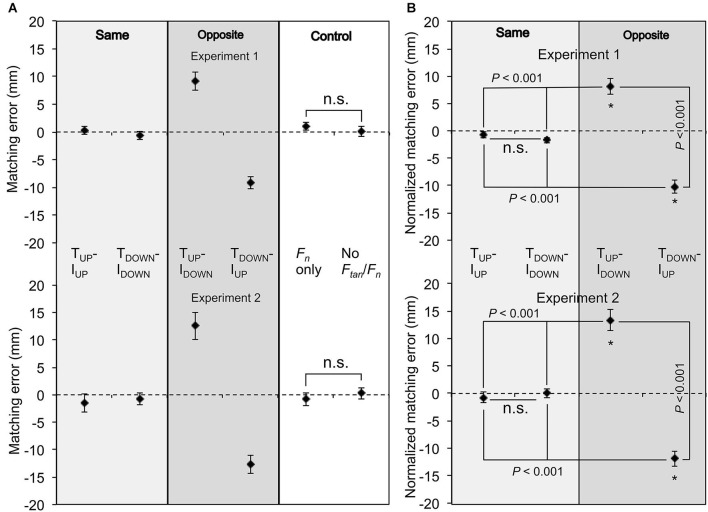
Humans are able to modulate digit forces as a function of position despite changes in digit placement that might occur from trial to trial or when changing grip type for object manipulation. Although this phenomenon is likely to rely on sensing the position of the digits relative to each other and the object, the underlying mechanisms remain unclear. To address this question, we asked subjects (n = 30) to match perceived vertical distance between the center of pressure (CoP) of the thumb and index finger pads (dy ) of the right hand ("reference" hand) using the same hand ("test" hand). The digits of reference hand were passively placed collinearly (dy = 0 mm). Subjects were then asked to exert different combinations of normal and tangential digit forces (Fn and Ftan , respectively) using the reference hand and then match the memorized dy using the test hand. The reference hand exerted Ftan of thumb and index finger in either same or opposite direction. We hypothesized that, when the tangential forces of the digits are produced in opposite directions, matching error (1) would be biased toward the directions of the tangential forces; and (2) would be greater when the remembered relative contact points are matched with negligible digit force production. For the test hand, digit forces were either negligible (0.5-1 N, 0 ± 0.25 N; Experiment 1) or the same as those exerted by the reference hand (Experiment 2).Matching error was biased towards the direction of digit tangential forces: thumb CoP was placed higher than the index finger CoP when thumb and index finger Ftan were directed upward and downward, respectively, and vice versa (p < 0.001). However, matching error was not dependent on whether the reference and test hand exerted similar or different forces. We propose that the expected sensory consequence of motor commands for tangential forces in opposite directions overrides estimation of fingertip position through haptic sensory feedback.
Keywords: feedback; grasping; hand; haptics; psychophysics.
Figures

Similar articles
-
Role of digit placement control in sensorimotor transformations for dexterous manipulation.J Neurophysiol. 2017 Nov 1;118(5):2935-2943. doi: 10.1152/jn.00211.2017. Epub 2017 Aug 23. J Neurophysiol. 2017. PMID: 28835523 Free PMC article.
-
Linear Integration of Tactile and Non-tactile Inputs Mediates Estimation of Fingertip Relative Position.Front Neurosci. 2019 Feb 11;13:68. doi: 10.3389/fnins.2019.00068. eCollection 2019. Front Neurosci. 2019. PMID: 30804743 Free PMC article.
-
Haptic-motor transformations for the control of finger position.PLoS One. 2013 Jun 6;8(6):e66140. doi: 10.1371/journal.pone.0066140. Print 2013. PLoS One. 2013. PMID: 23762477 Free PMC article.
-
Control of fingertip forces in multidigit manipulation.J Neurophysiol. 1999 Apr;81(4):1706-17. doi: 10.1152/jn.1999.81.4.1706. J Neurophysiol. 1999. PMID: 10200206
-
Digit force adjustments during finger addition/removal in multi-digit prehension.Exp Brain Res. 2008 Aug;189(3):345-59. doi: 10.1007/s00221-008-1430-9. Epub 2008 Jun 14. Exp Brain Res. 2008. PMID: 18553076 Free PMC article.
Cited by
-
Role of digit placement control in sensorimotor transformations for dexterous manipulation.J Neurophysiol. 2017 Nov 1;118(5):2935-2943. doi: 10.1152/jn.00211.2017. Epub 2017 Aug 23. J Neurophysiol. 2017. PMID: 28835523 Free PMC article.
-
Linear Integration of Tactile and Non-tactile Inputs Mediates Estimation of Fingertip Relative Position.Front Neurosci. 2019 Feb 11;13:68. doi: 10.3389/fnins.2019.00068. eCollection 2019. Front Neurosci. 2019. PMID: 30804743 Free PMC article.
-
On neuromechanical approaches for the study of biological and robotic grasp and manipulation.J Neuroeng Rehabil. 2017 Oct 9;14(1):101. doi: 10.1186/s12984-017-0305-3. J Neuroeng Rehabil. 2017. PMID: 29017508 Free PMC article. Review.
-
How Weight Affects the Perceived Spacing between the Thumb and Fingers during Grasping.PLoS One. 2015 May 21;10(5):e0127983. doi: 10.1371/journal.pone.0127983. eCollection 2015. PLoS One. 2015. PMID: 25996760 Free PMC article.
References
-
- Adamovich S. V., Berkinblit M. B., Fookson O., Poizner H. (1998). Pointing in 3D space to remembered targets. I. Kinesthetic versus visual target presentation. J. Neurophysiol. 79, 2833–2846 - PubMed
-
- Barbagli F., Salisbury K., Ho C., Spence C., Tan H. Z. (2006). Haptic discrimination of force direction and the influence of visual information. ACM Trans. Appl. Percept. 3, 125–135 10.1145/1141897.1141901 - DOI
LinkOut - more resources
Full Text Sources
Other Literature Sources
Miscellaneous