

Unintentional movements produced by back-coupling between the actual and referent body configurations: violations of equifinality in multi-joint positional tasks
- PMID: 25150552
- PMCID: PMC4241166
- DOI: 10.1007/s00221-014-4059-x
Unintentional movements produced by back-coupling between the actual and referent body configurations: violations of equifinality in multi-joint positional tasks
Abstract
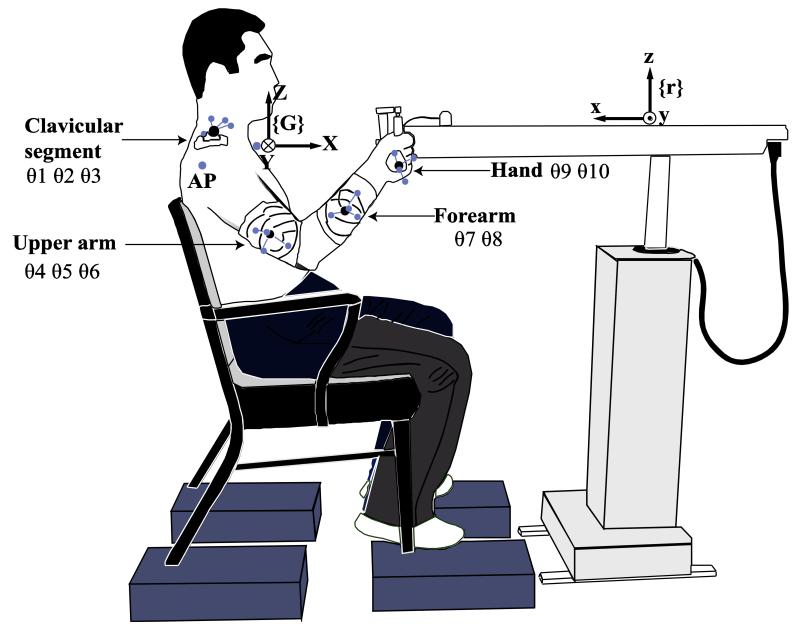
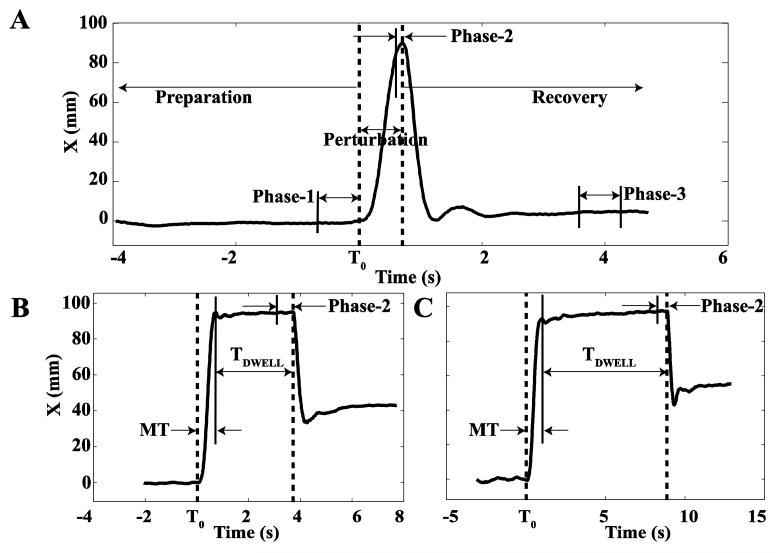
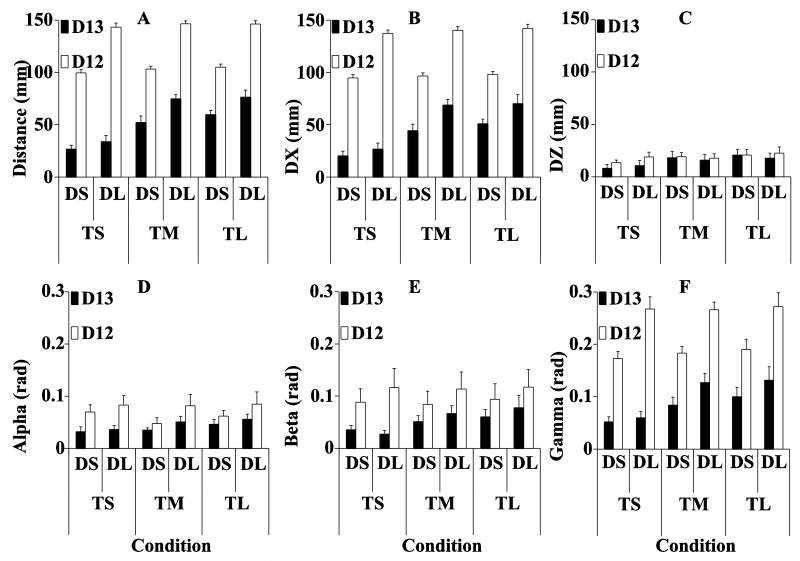
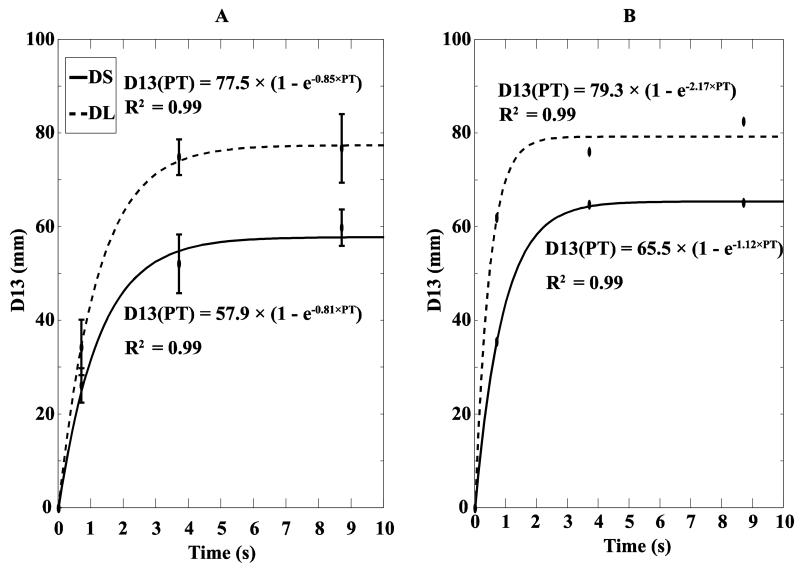
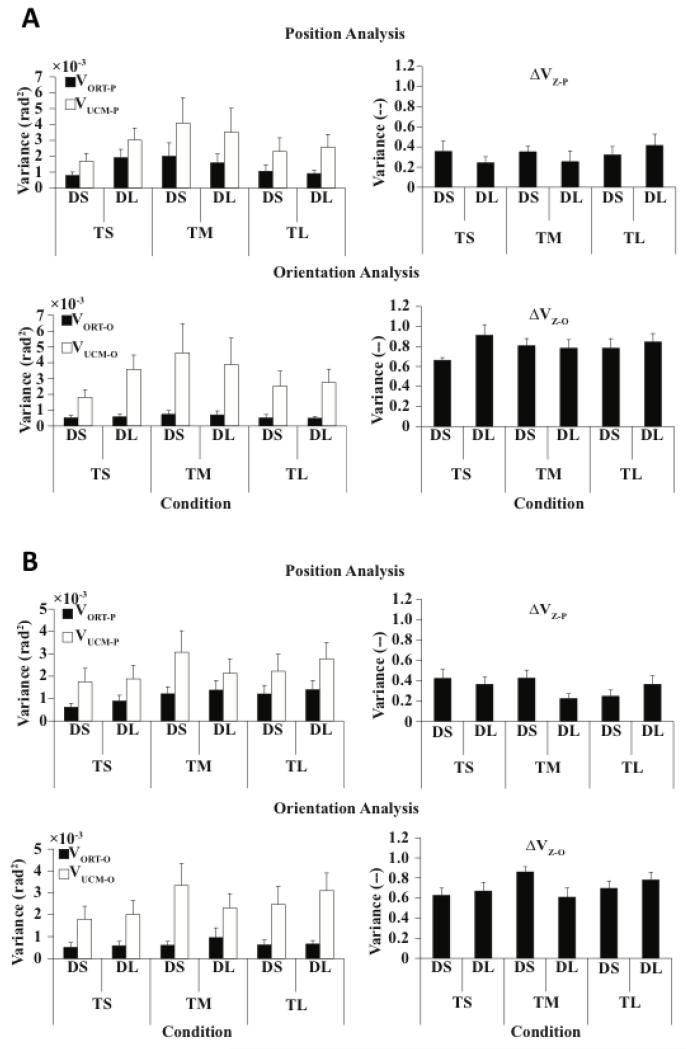
We tested several predictions of a recent theory that combines the ideas of control with referent configurations, hierarchical control, and the uncontrolled manifold (UCM) hypothesis. In particular, we tested a hypothesis that unintentional changes in hand coordinate can happen following a long-lasting transient perturbation. The subjects grasped a handle with the right hand, occupied an initial position against a bias force produced by the HapticMaster robot, and then tried not to react to changes in the robot-produced force. Changes in the force were smooth and transient; they always ended with the same force as the bias force. The force-change amplitude and the time the force was kept at the new level (dwell time) varied across conditions. After the transient force change was over, the handle rested in a position that differed significantly from the initial position. The amplitude of this unintentional movement increased with the amplitude of transient force change and with the dwell time. In the new position, the across-trials joint configuration variance was mostly confined to a subspace compatible with the average handle coordinate and orientation (the UCMs for these variables). We view these results as the first experimental support for the hypothesis on back-coupling between the referent and actual body configurations during multi-joint actions. The results suggest that even under the instruction "not to react to transient force changes," the subjects may be unable to prevent unintentional drift of the referent configuration. The structure of joint configuration variance after such movements was similar to that in earlier reports on joint configuration variance after intentional movements. We conclude that the intentional and unintentional movements are products of a single neural system that can lead to intentional and unintentional shifts of the referent body configuration.
Figures
References
-
- Adamovich SV, Levin MF, Feldman AG. Central modifications of reflex parameters may underlie the fastest arm movements. J Neurophysiol. 1997;77:1460–1469. - PubMed
-
- Bernstein NA. The Co-ordination and Regulation of Movements. Pergamon Press; Oxford: 1967.
-
- Bizzi E, Polit A, Morasso P. Mechanisms underlying achievement of final head position. J Neurophysiol. 1976;39:435–44. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
