

Noncontact orientation of objects in three-dimensional space using magnetic levitation
- PMID: 25157136
- PMCID: PMC4246944
- DOI: 10.1073/pnas.1408705111
Noncontact orientation of objects in three-dimensional space using magnetic levitation
Abstract
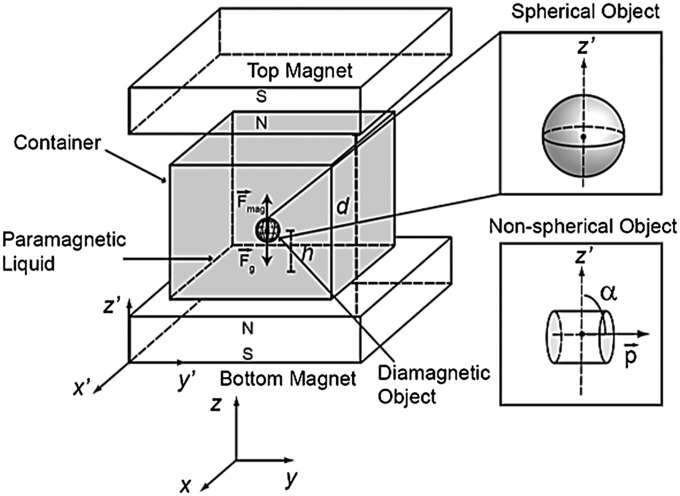
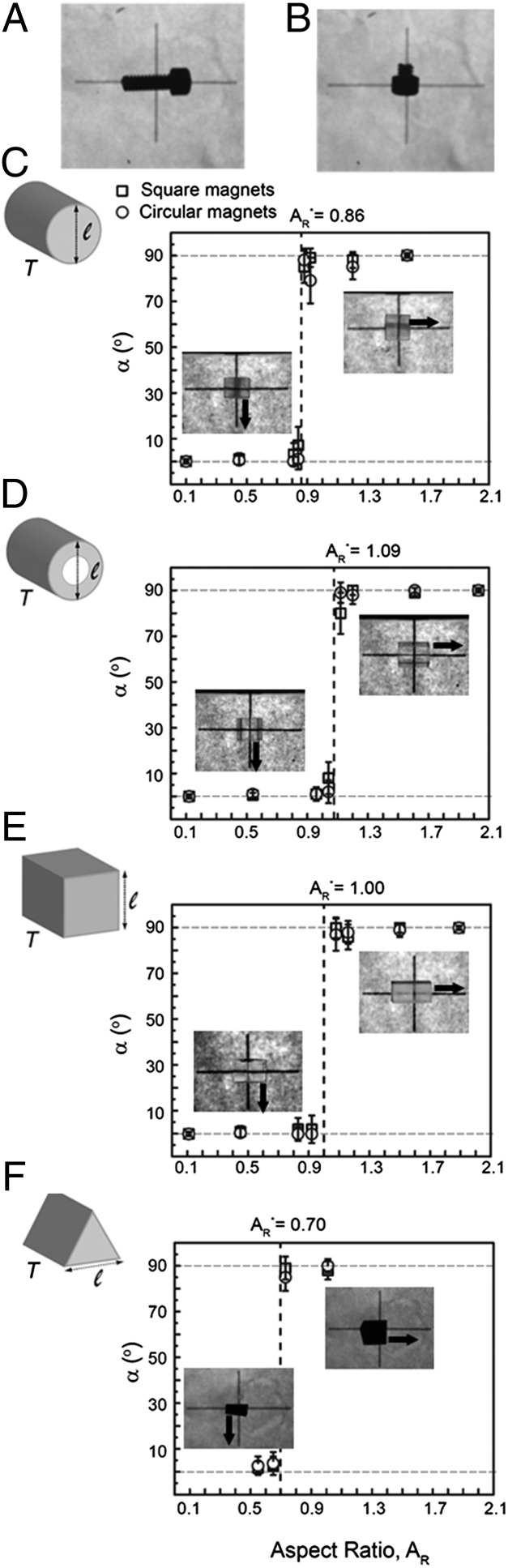
This paper describes several noncontact methods of orienting objects in 3D space using Magnetic Levitation (MagLev). The methods use two permanent magnets arranged coaxially with like poles facing and a container containing a paramagnetic liquid in which the objects are suspended. Absent external forcing, objects levitating in the device adopt predictable static orientations; the orientation depends on the shape and distribution of mass within the objects. The orientation of objects of uniform density in the MagLev device shows a sharp geometry-dependent transition: an analytical theory rationalizes this transition and predicts the orientation of objects in the MagLev device. Manipulation of the orientation of the levitating objects in space is achieved in two ways: (i) by rotating and/or translating the MagLev device while the objects are suspended in the paramagnetic solution between the magnets; (ii) by moving a small external magnet close to the levitating objects while keeping the device stationary. Unlike mechanical agitation or robotic selection, orienting using MagLev is possible for objects having a range of different physical characteristics (e.g., different shapes, sizes, and mechanical properties from hard polymers to gels and fluids). MagLev thus has the potential to be useful for sorting and positioning components in 3D space, orienting objects for assembly, constructing noncontact devices, and assembling objects composed of soft materials such as hydrogels, elastomers, and jammed granular media.
Keywords: colloidosomes; equilibrium; magneto-Archimedes levitation; self-assembly; soft robot.
Conflict of interest statement
The authors declare no conflict of interest.
Figures




References
-
- Horn BKP, Ikeuchi K. The mechanical manipulation of randomly oriented parts. Sci Am. 1984;251(2):100–111.
-
- Cappelleri DJ, Cheng P, Fink J, Gavrea B, Kumar V. Automated assembly for mesoscale parts. IEEE Trans Autom Sci Eng. 2011;8(3):598–613.
-
- Schraft RD, Ledermann T. Intelligent picking of chaotically stored objects. Assem. Autom. 2003;23(1):38–42.
-
- Shea K, Ertelt C, Gmeiner T, Ameri F. Design-to-fabrication automation for the cognitive machine shop. Adv Eng Inform. 2010;24(3):251–268.
-
- Fusco S, et al. An integrated microrobotic platform for on-demand, targeted therapeutic interventions. Adv Mater. 2014;26(6):952–957. - PubMed
Publication types
LinkOut - more resources
Full Text Sources
Other Literature Sources
