

Proceedings of the first workshop on Peripheral Machine Interfaces: going beyond traditional surface electromyography
- PMID: 25177292
- PMCID: PMC4133701
- DOI: 10.3389/fnbot.2014.00022
Proceedings of the first workshop on Peripheral Machine Interfaces: going beyond traditional surface electromyography
Abstract
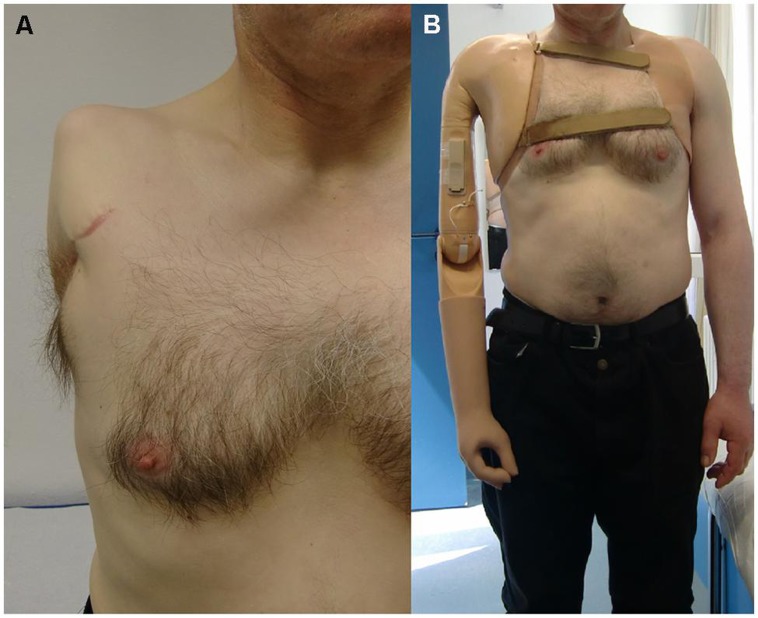
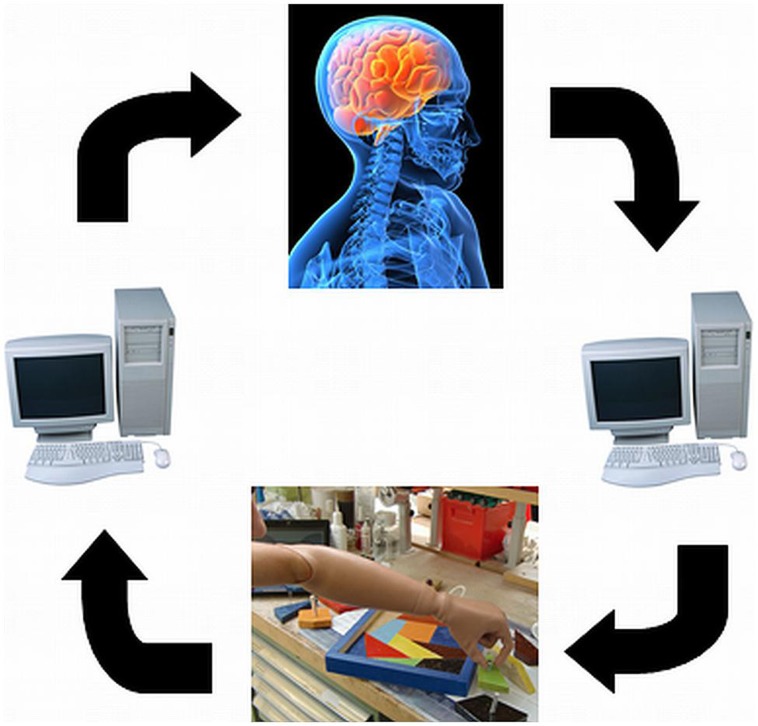
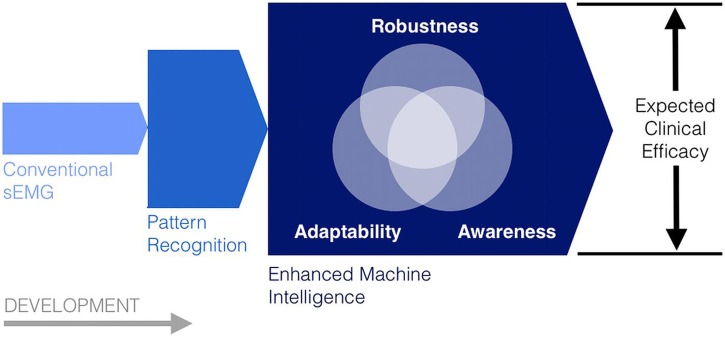
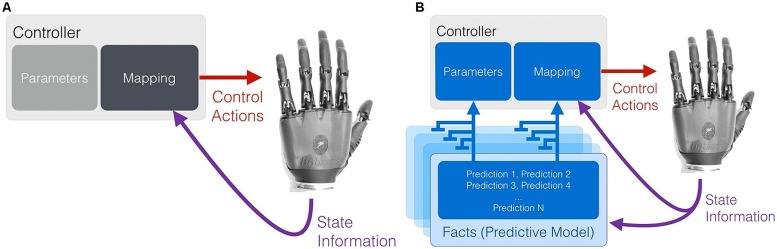
One of the hottest topics in rehabilitation robotics is that of proper control of prosthetic devices. Despite decades of research, the state of the art is dramatically behind the expectations. To shed light on this issue, in June, 2013 the first international workshop on Present and future of non-invasive peripheral nervous system (PNS)-Machine Interfaces (MI; PMI) was convened, hosted by the International Conference on Rehabilitation Robotics. The keyword PMI has been selected to denote human-machine interfaces targeted at the limb-deficient, mainly upper-limb amputees, dealing with signals gathered from the PNS in a non-invasive way, that is, from the surface of the residuum. The workshop was intended to provide an overview of the state of the art and future perspectives of such interfaces; this paper represents is a collection of opinions expressed by each and every researcher/group involved in it.
Keywords: EMG; human–machine interfaces; prosthetic control; prosthetics; rehabilitation robotics.
Figures

Comment in
-
Commentary: Proceedings of the First Workshop on Peripheral Machine Interfaces: Going beyond Traditional Surface Electromyography.Front Neurorobot. 2017 Jul 5;11:32. doi: 10.3389/fnbot.2017.00032. eCollection 2017. Front Neurorobot. 2017. PMID: 28725192 Free PMC article. No abstract available.
References
-
- Ajoudani A., Tsagarakis N. G., Bicchi A. (2011) “Tele-impedance: preliminary results on measuring and replicating human arm impedance in tele operated robots,” in Proceedings of IEEE International Conference on Robotics and Biomimetics (ROBIO) (Phuket: IEEE; ), 216–222 10.1109/ICRA.2012.6224904 - DOI
-
- Atzori M., Gijsberts A., Heynen S., Mittaz Hager A.-G., Deriaz O., van der Smagt P., et al. (2012). “Building the Ninapro database: a resource for the biorobotics community,” in Proceedings of Biomedical Robotics and Biomechatronics (BioRob), 2014 4th IEEE RAS and EMBS International Conference, Rome. 10.1109/BioRob.2012.6290287 - DOI
Publication types
LinkOut - more resources
Full Text Sources
Other Literature Sources