

Infant trunk posture and arm movement assessment using pressure mattress, inertial and magnetic measurement units (IMUs)
- PMID: 25194825
- PMCID: PMC4247204
- DOI: 10.1186/1743-0003-11-133
Infant trunk posture and arm movement assessment using pressure mattress, inertial and magnetic measurement units (IMUs)
Abstract
Background: Existing motor pattern assessment methods, such as digital cameras and optoelectronic systems, suffer from object obstruction and require complex setups. To overcome these drawbacks, this paper presents a novel approach for biomechanical evaluation of newborn motor skills development. Multi-sensor measurement system comprising pressure mattress and IMUs fixed on trunk and arms is proposed and used as alternative to existing methods. Observed advantages seem appealing for the focused field and in general. Combined use of pressure distribution data and kinematic information is important also for posture assessment, ulcer prevention, and non-invasive sleep pattern analysis of adults.
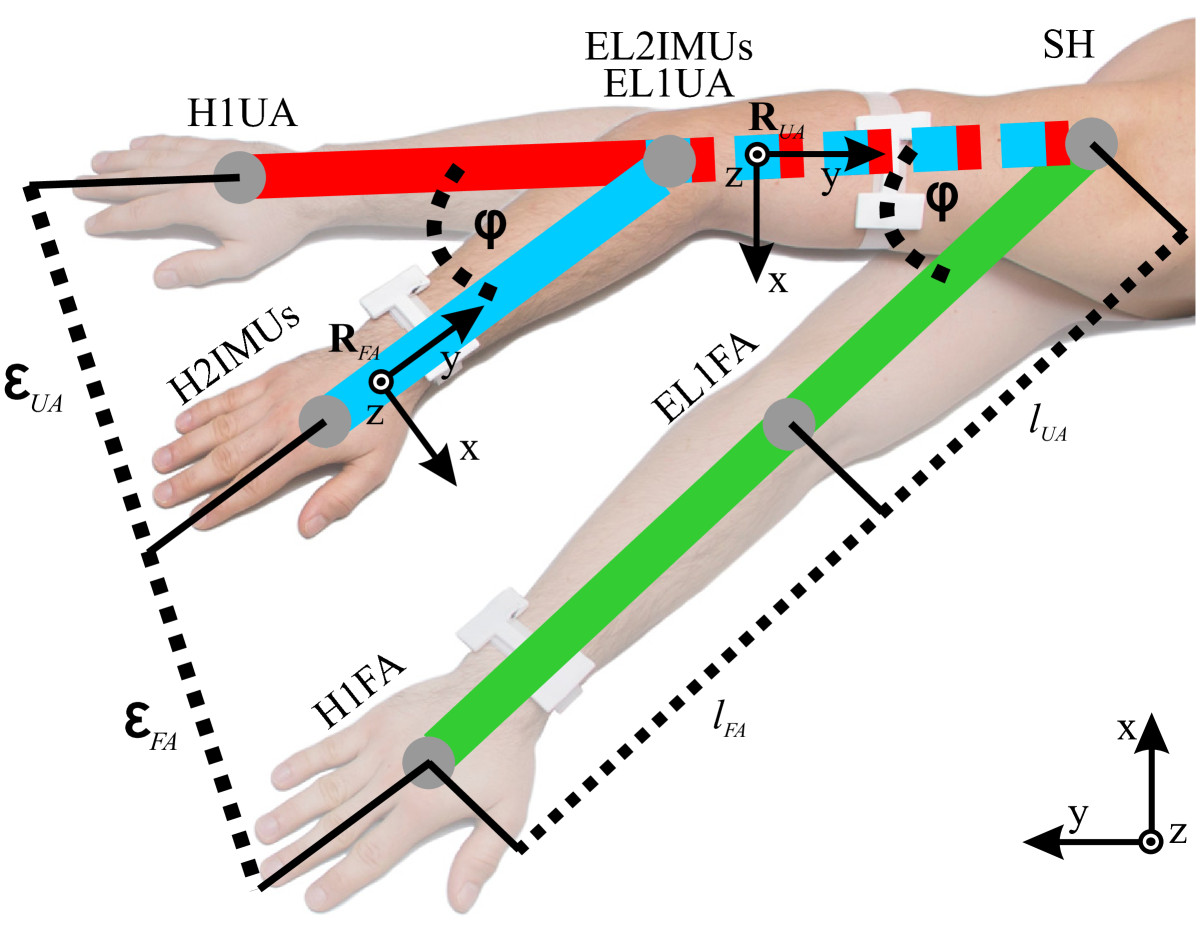
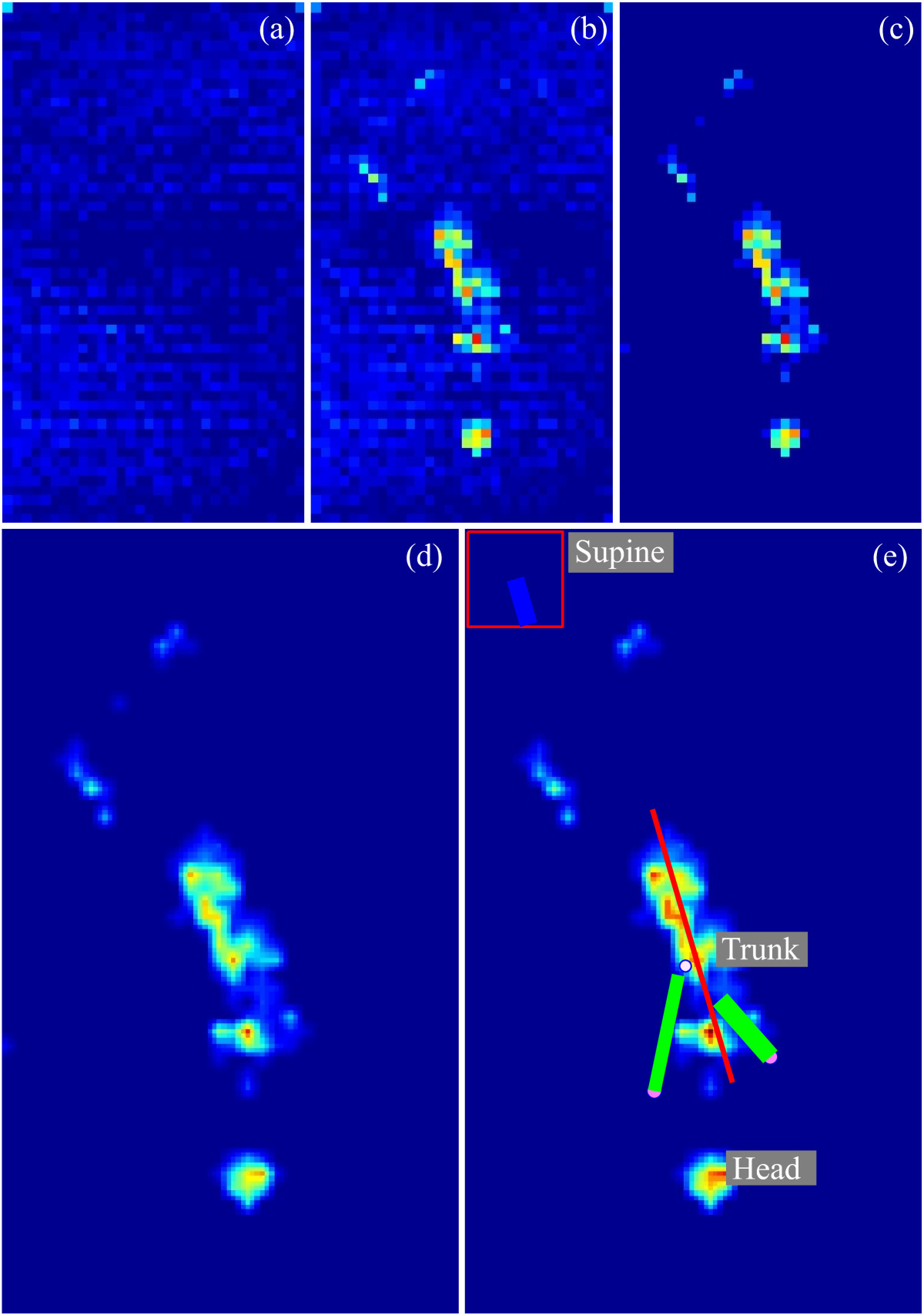
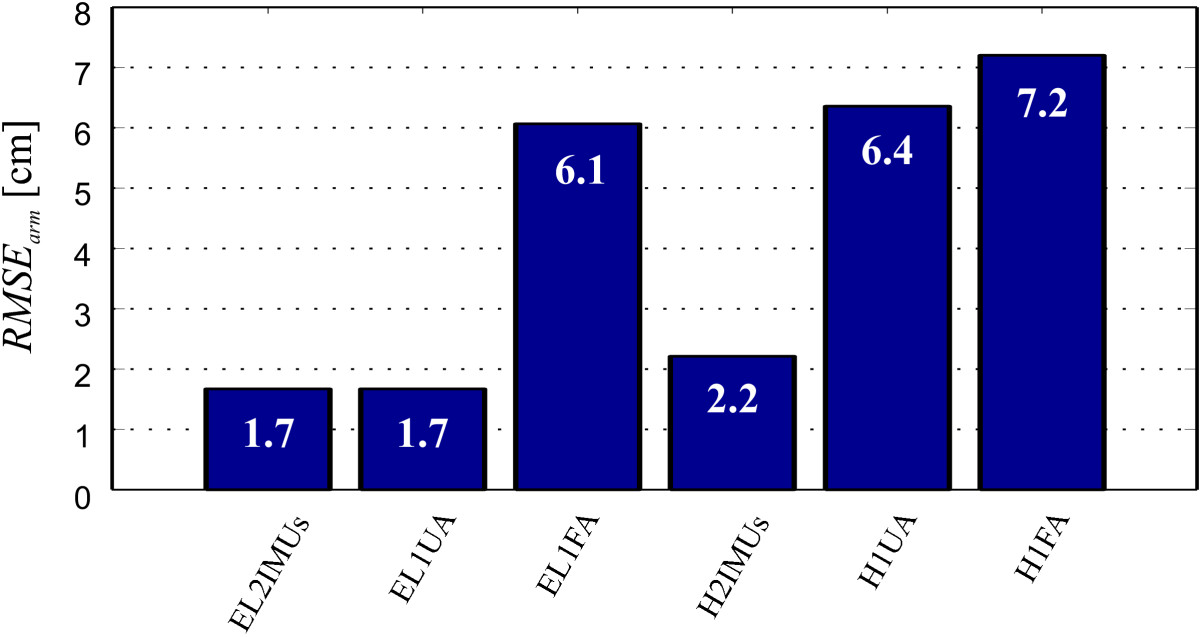
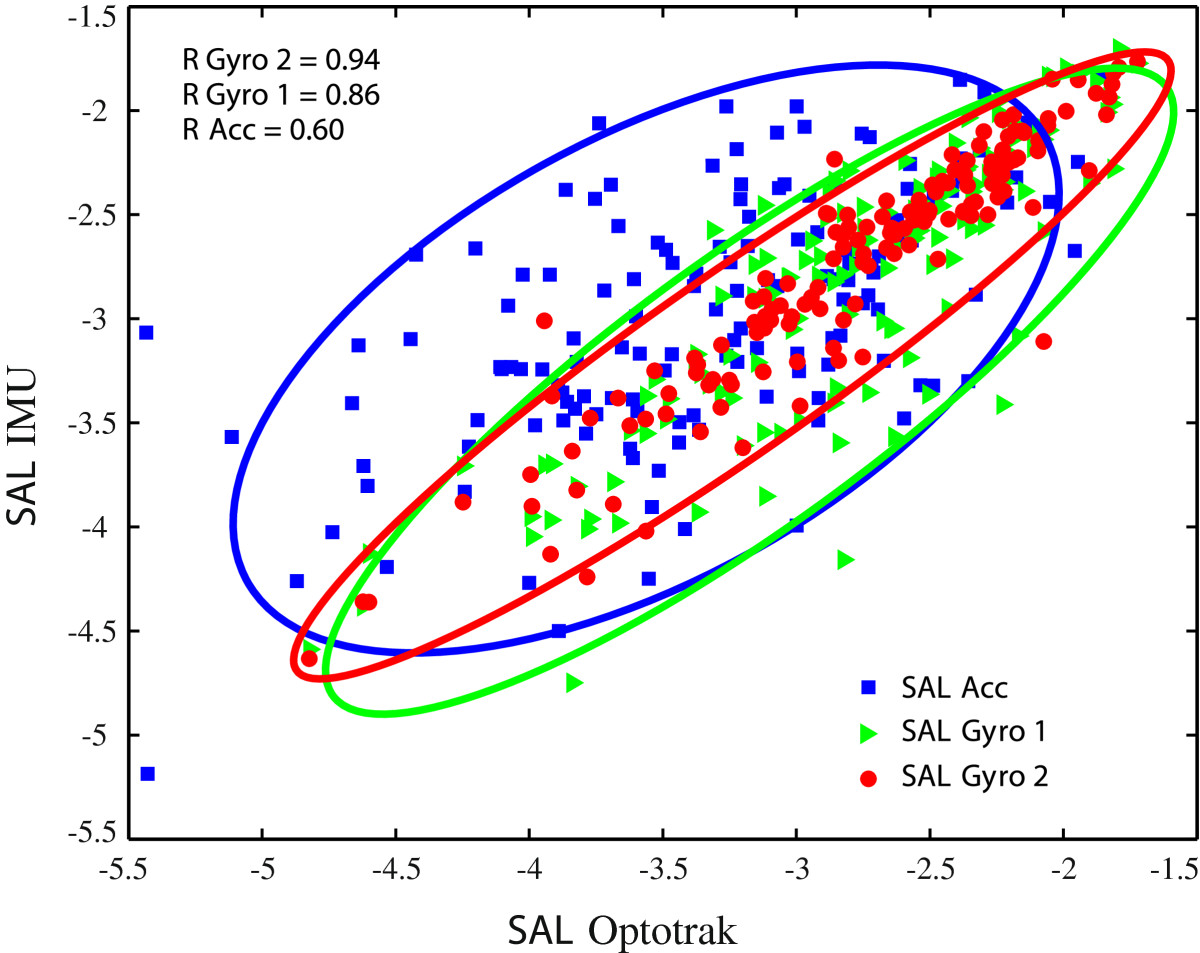
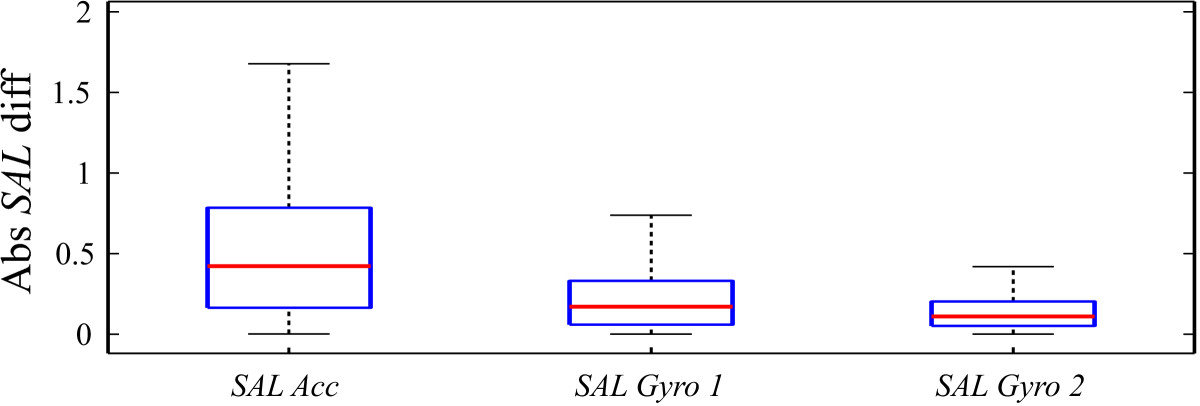
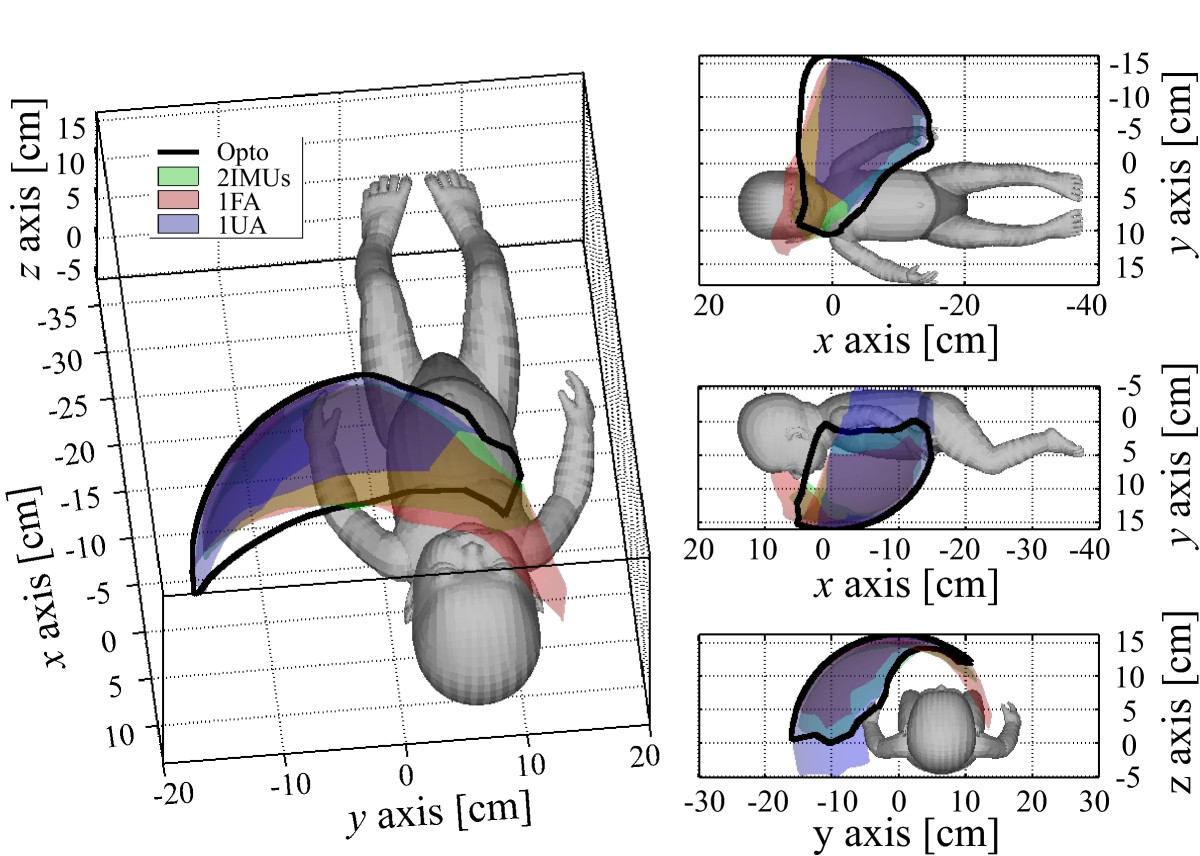
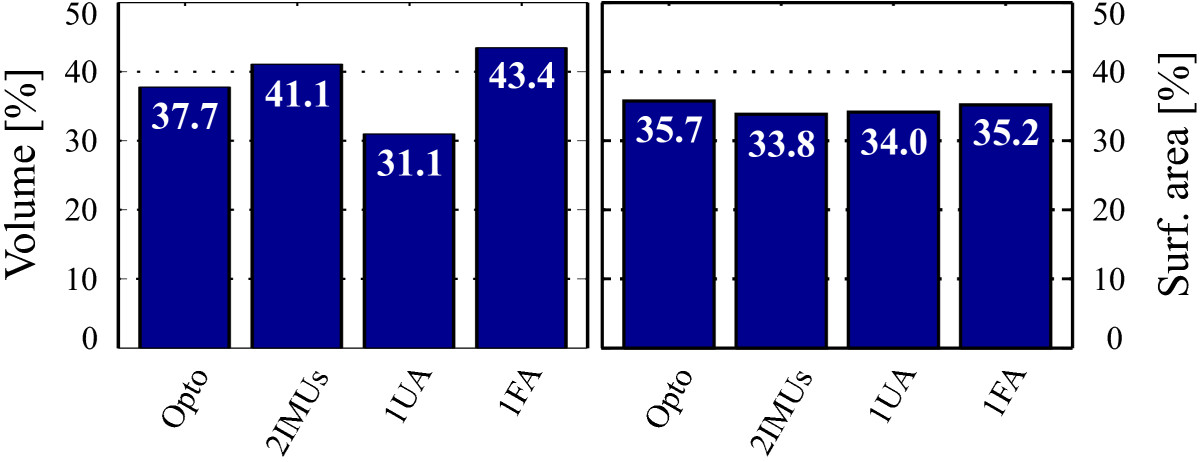
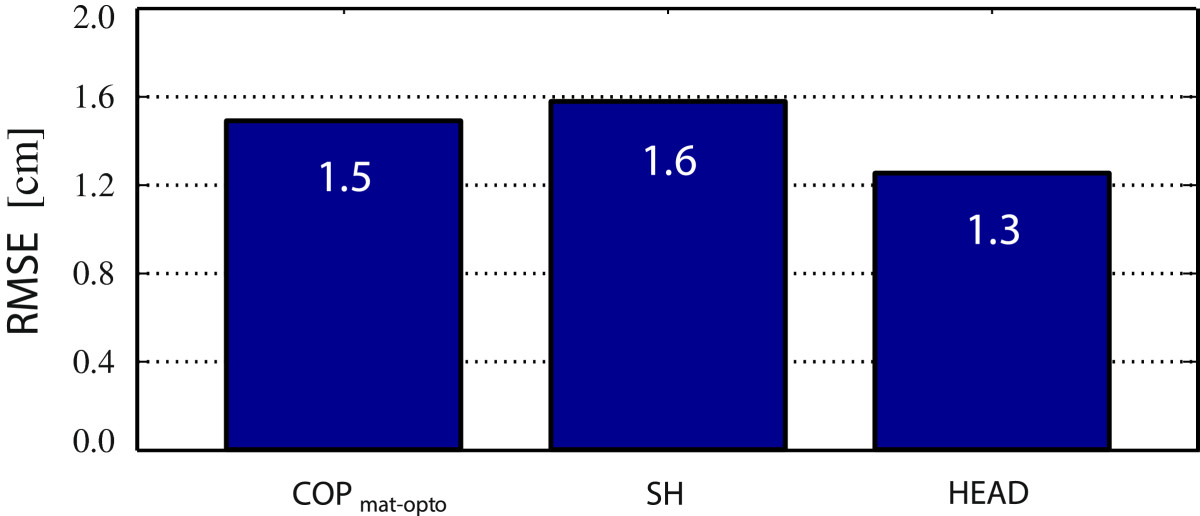
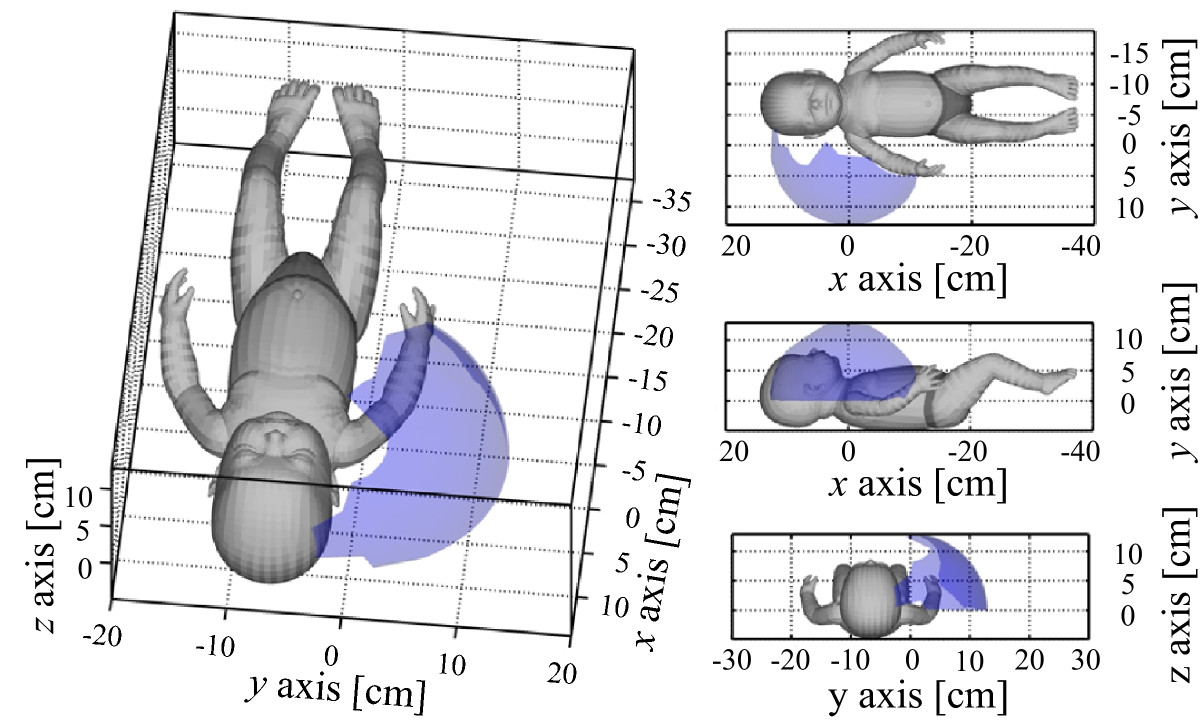
Methods: Arm kinematic parameters, such as root-mean-square acceleration, spectral arc length of hand velocity profile, including arm workspace surface area, and travelled hand path are obtained with the multi-sensor measurement system and compared to normative motion capture data for evaluation of adequacy. Two IMUs per arm, only one IMU on upper arm, and only one IMU on forearm sensor placement options are studied to assess influence of system configuration on method precision. Combination of pressure mattress and IMU fixed on the trunk is used to measure trunk position (obtained from mat), rotation (from IMUs) and associated movements on surface (from both). Measurement system is first validated on spontaneous arm and trunk movements of a dedicated baby doll having realistic anthropometric characteristics of newborns. Next, parameters of movements in a healthy infant are obtained with pressure mattress, along with trunk and forearm IMU sensors to verify appropriateness of method and parameters.
Results: Evaluation results confirm that full sensor set, comprising pressure mattress and two IMUs per arm is a reliable substitution to optoelectronic systems. Motor pattern parameter errors are under 10% and kinematic estimation error is in range of 2 cm. Although, use of only forearm IMU is not providing best possible kinematic precision, the simplicity of use and still acceptable accuracy are convincing for frequent practical use. Measurements demonstrated system high mobility and usability.
Conclusions: Study results confirm adequacy of the proposed multi-sensor measurement system, indicating its enviable potential for accurate infant trunk posture and arm movement assessment.
Figures


References
-
- Adolph KE, Berger SE. Physical and motor development. In: Bornstein MH, Lamb ME, editors. Developmental Science: An Advanced Textbook. Mahwah: Lawrence Erlbaum Associates, Inc.; 2005. pp. 223–281.
-
- Spittle A, Orton J, Anderson P, Boyd R, Doyle LW. Cochrane Db Syst Rev. 2012. Early developmental intervention programmes post-hospital discharge to prevent motor and cognitive impairments in preterm infants. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
