

Mechanisms of Gait Asymmetry Due to Push-Off Deficiency in Unilateral Amputees
- PMID: 25222950
- PMCID: PMC4483155
- DOI: 10.1109/TNSRE.2014.2356722
Mechanisms of Gait Asymmetry Due to Push-Off Deficiency in Unilateral Amputees
Abstract
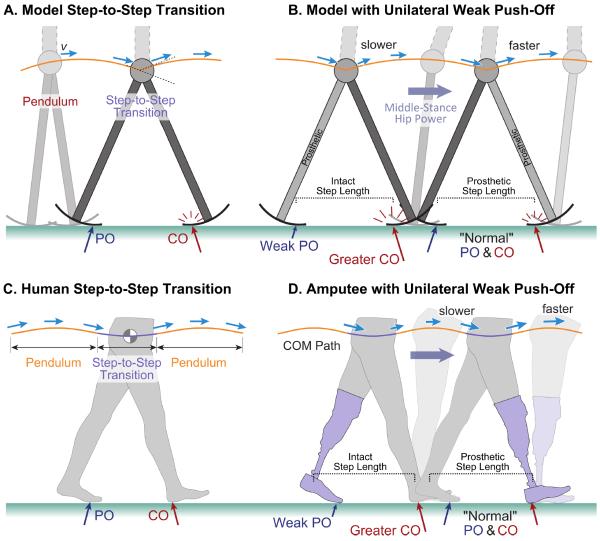
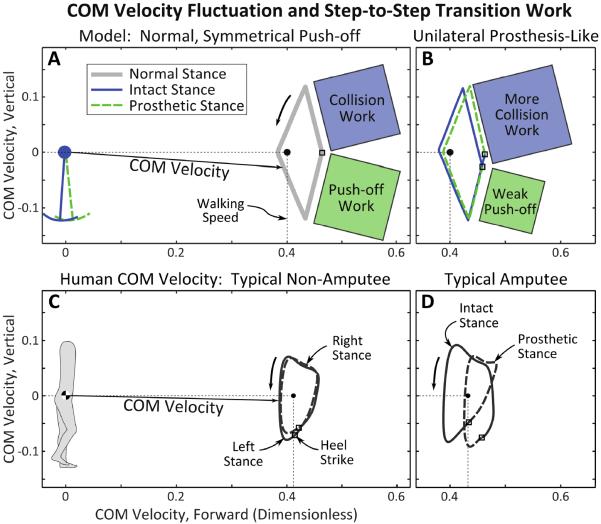
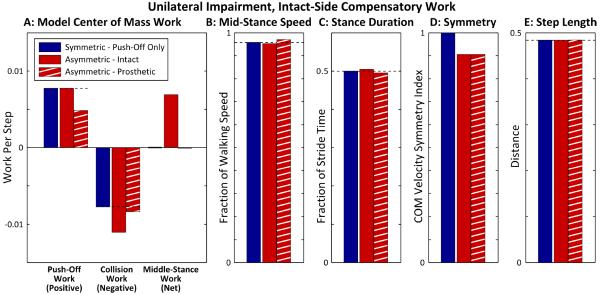
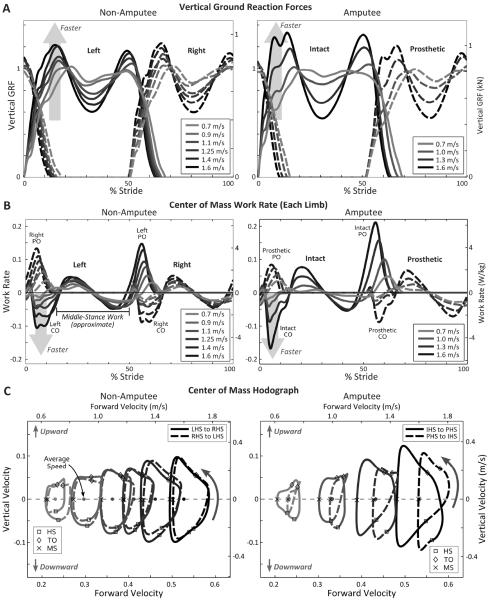
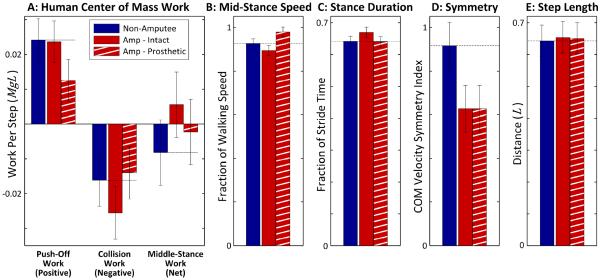
Unilateral lower-limb amputees exhibit asymmetry in many gait features, such as ground force, step time, step length, and joint mechanics. Although these asymmetries result from weak prosthetic-side push-off, there is no proven mechanistic explanation of how that impairment propagates to the rest of the body. We used a simple dynamic walking model to explore possible consequences of a unilateral impairment similar to that of a transtibial amputee. The model compensates for reduced push-off work from one leg by performing more work elsewhere, for example during the middle of stance by either or both legs. The model predicts several gait abnormalities, including slower forward velocity of the body center-of-mass during intact-side stance, greater energy dissipation in the intact side, and more positive work overall. We tested these predictions with data from unilateral transtibial amputees (N = 11) and nonamputee control subjects (N = 10) walking on an instrumented treadmill. We observed several predicted asymmetries, including forward velocity during stance phases and energy dissipation from the two limbs, as well as greater work overall. Secondary adaptations, such as to reduce discomfort, may exacerbate asymmetry, but these simple principles suggest that some asymmetry may be unavoidable in cases of unilateral limb loss.
Figures
References
-
- Cheung C, Wall JC, Zelin S. A microcomputer-based system for measuring temporal asymmetry in amputee gait. Prosthet. Orthot. Int. 1983;7(1):131–140. - PubMed
-
- Dingwell JB, Davis BL, Frazder DM. Use of an instrumented treadmill for real-time gait symmetry evaluation and feedback in normal and trans-tibial amputee subjects. Prosthet. Orthot. Int. 1996;20(2):101–110. - PubMed
-
- Isakov E, Keren O, Benjuya N. Trans–tibial amputee gait: Time–distance parameters and EMG activity. Prosthet. Orthot. Int. 2000;24(3):216–220. - PubMed
-
- Nolan L, Lees A. The functional demands on the intact limb during walking for active trans-femoral and trans-tibial amputees. Prosthet. Orthot. Int. 2000;24(2):117–125. - PubMed
-
- Nolan L, Wit A, Dudziñski K, Lees A, Lake M, Wychowañski M. Adjustments in gait symmetry with walking speed in transfemoral and trans-tibial amputees. Gait Posture. 2003;17(2):142–151. - PubMed
