

Statistical analysis-based error models for the Microsoft Kinect(TM) depth sensor
- PMID: 25237896
- PMCID: PMC4208232
- DOI: 10.3390/s140917430
Statistical analysis-based error models for the Microsoft Kinect(TM) depth sensor
Abstract
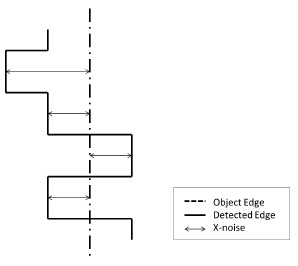
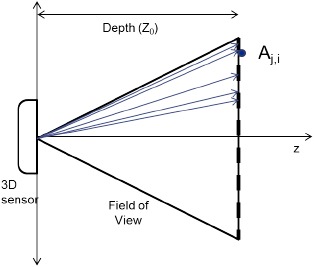
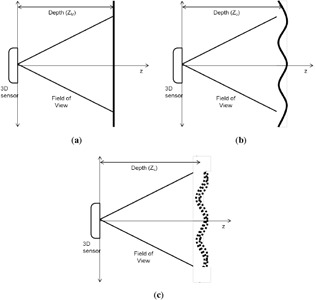
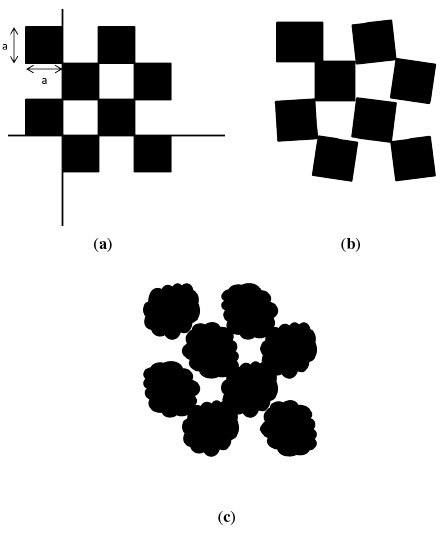
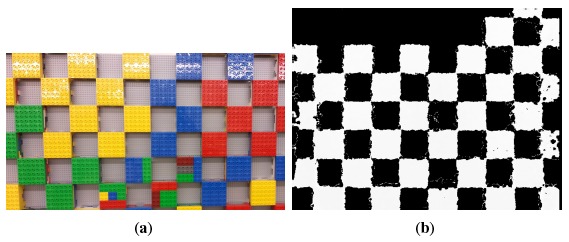
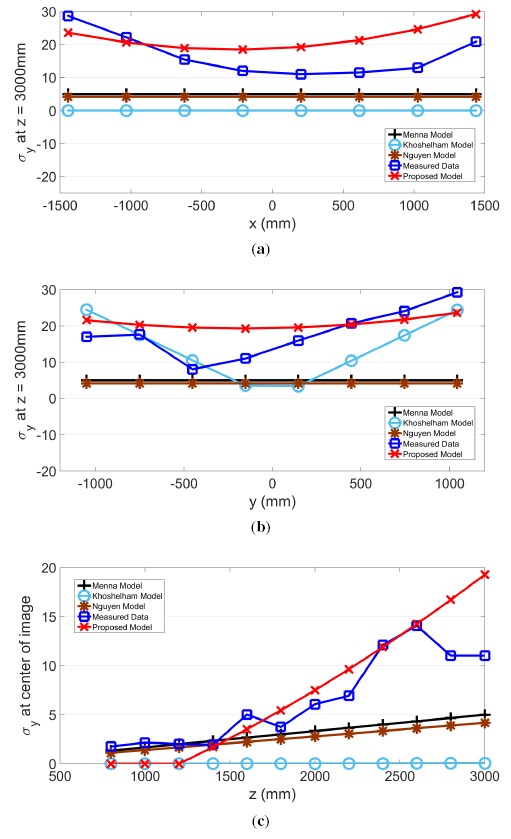
The stochastic error characteristics of the Kinect sensing device are presented for each axis direction. Depth (z) directional error is measured using a flat surface, and horizontal (x) and vertical (y) errors are measured using a novel 3D checkerboard. Results show that the stochastic nature of the Kinect measurement error is affected mostly by the depth at which the object being sensed is located, though radial factors must be considered, as well. Measurement and statistics-based models are presented for the stochastic error in each axis direction, which are based on the location and depth value of empirical data measured for each pixel across the entire field of view. The resulting models are compared against existing Kinect error models, and through these comparisons, the proposed model is shown to be a more sophisticated and precise characterization of the Kinect error distributions.
Figures





References
-
- Rude D., Adams S., Cogill R., Beling P. Task Recognition from Joint Tracking Data Using Simultaneous Feature Selection and Parameter Estimation in Hidden Markov Models. 2014 under review.
Publication types
LinkOut - more resources
Full Text Sources
Other Literature Sources
