

Stepping in the direction of the fall: the next foot placement can be predicted from current upper body state in steady-state walking
- PMID: 25252834
- PMCID: PMC4190959
- DOI: 10.1098/rsbl.2014.0405
Stepping in the direction of the fall: the next foot placement can be predicted from current upper body state in steady-state walking
Abstract
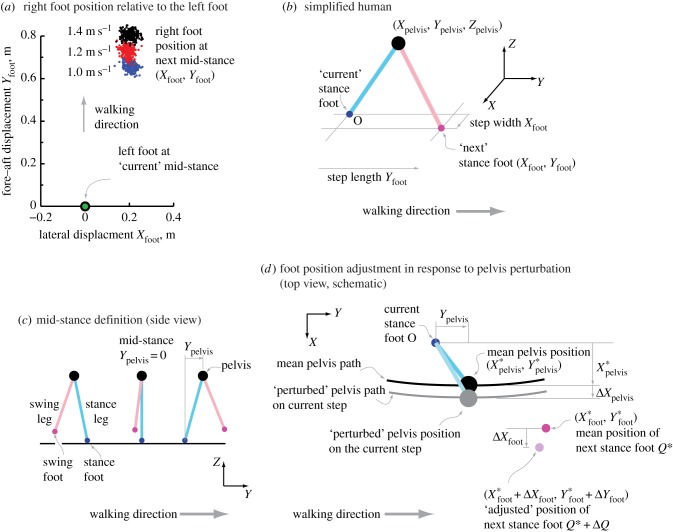
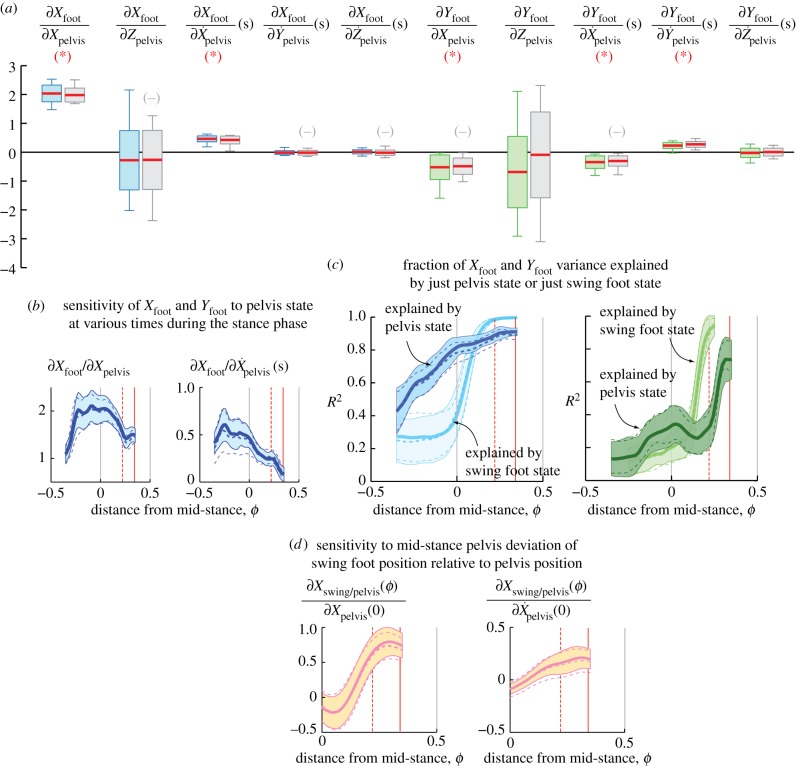
During human walking, perturbations to the upper body can be partly corrected by placing the foot appropriately on the next step. Here, we infer aspects of such foot placement dynamics using step-to-step variability over hundreds of steps of steady-state walking data. In particular, we infer dependence of the 'next' foot position on upper body state at different phases during the 'current' step. We show that a linear function of the hip position and velocity state (approximating the body center of mass state) during mid-stance explains over 80% of the next lateral foot position variance, consistent with (but not proving) lateral stabilization using foot placement. This linear function implies that a rightward pelvic deviation during a left stance results in a larger step width and smaller step length than average on the next foot placement. The absolute position on the treadmill does not add significant information about the next foot relative to current stance foot over that already available in the pelvis position and velocity. Such walking dynamics inference with steady-state data may allow diagnostics of stability and inform biomimetic exoskeleton or robot design.
Keywords: biomechanics; control; dynamics; foot placement; stability; walking.
© 2014 The Author(s) Published by the Royal Society. All rights reserved.
Figures
References
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical