

Information transfer and behavioural inertia in starling flocks
- PMID: 25264452
- PMCID: PMC4173114
- DOI: 10.1038/nphys3035
Information transfer and behavioural inertia in starling flocks
Abstract
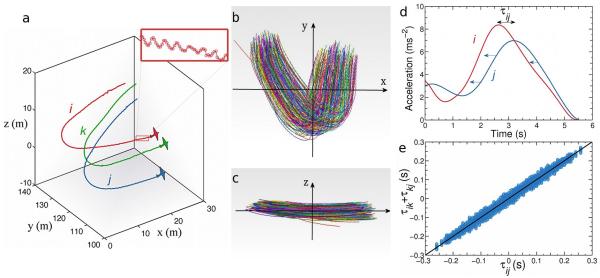
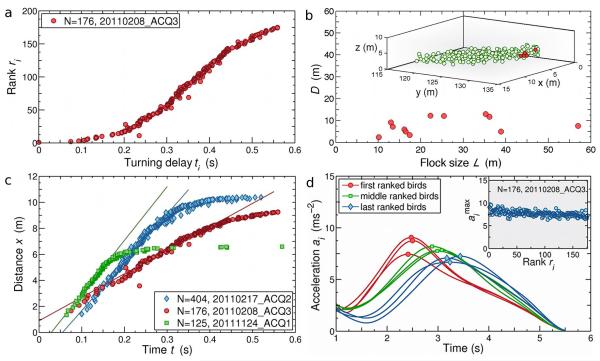
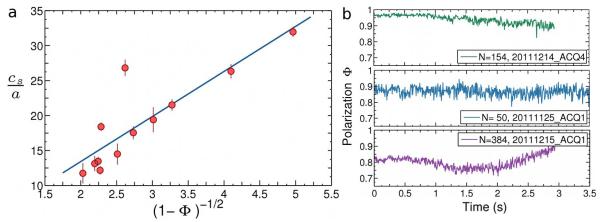
Collective decision-making in biological systems requires all individuals in the group to go through a behavioural change of state. During this transition fast and robust transfer of information is essential to prevent cohesion loss. The mechanism by which natural groups achieve such robustness, though, is not clear. Here we present an experimental study of starling flocks performing collective turns. We find that information about direction changes propagates across the flock with a linear dispersion law and negligible attenuation, hence minimizing group decoherence. These results contrast starkly with current models of collective motion, which predict diffusive transport of information. Building on spontaneous symmetry breaking and conservation laws arguments, we formulate a new theory that correctly reproduces linear and undamped propagation. Essential to the new framework is the inclusion of the birds' behavioural inertia. The new theory not only explains the data, but also predicts that information transfer must be faster the stronger the group's orientational order, a prediction accurately verified by the data. Our results suggest that swift decision-making may be the adaptive drive for the strong behavioural polarization observed in many living groups.
Figures
References
-
- Conradt L, Roper TJ. Consensus decision making in animals. Trend Ecol. Evol. 2005;20:449–456. - PubMed
-
- Parrish JK, Hamner WH, editors. Animal Groups in Three Dimensions. Cambridge Univ. Press; 1997.
-
- Krause J, Ruxton GD. Living in Groups. Oxford University Press; Oxford: 2002.
-
- Couzin ID, Krause J. Self-organization and collective behavior in vertebrates. Adv. Study Behav. 2003;32:1–75.
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources