

The why, what, where, when and how of goal-directed choice: neuronal and computational principles
- PMID: 25267825
- PMCID: PMC4186236
- DOI: 10.1098/rstb.2013.0483
The why, what, where, when and how of goal-directed choice: neuronal and computational principles
Abstract
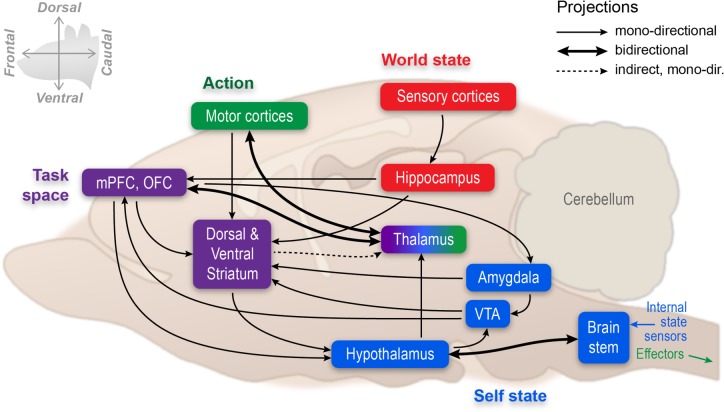
The central problems that goal-directed animals must solve are: 'What do I need and Why, Where and When can this be obtained, and How do I get it?' or the H4W problem. Here, we elucidate the principles underlying the neuronal solutions to H4W using a combination of neurobiological and neurorobotic approaches. First, we analyse H4W from a system-level perspective by mapping its objectives onto the Distributed Adaptive Control embodied cognitive architecture which sees the generation of adaptive action in the real world as the primary task of the brain rather than optimally solving abstract problems. We next map this functional decomposition to the architecture of the rodent brain to test its consistency. Following this approach, we propose that the mammalian brain solves the H4W problem on the basis of multiple kinds of outcome predictions, integrating central representations of needs and drives (e.g. hypothalamus), valence (e.g. amygdala), world, self and task state spaces (e.g. neocortex, hippocampus and prefrontal cortex, respectively) combined with multi-modal selection (e.g. basal ganglia). In our analysis, goal-directed behaviour results from a well-structured architecture in which goals are bootstrapped on the basis of predefined needs, valence and multiple learning, memory and planning mechanisms rather than being generated by a singular computation.
Keywords: computational modelling; decision-making; distributed adaptive control; embodied cognition; goal-directed behaviour; reward.
Figures

References
-
- Tolman EC. 1932. Purposive behavior in animals and man. New York, NY: Century Co.
-
- Newell A. 1990. Unified theories of cognition. Cambridge, MA: Harvard University Press.
-
- Verschure PFMJ, Althaus P. 2003. A real-world rational agent: unifying old and new AI. Cogn. Sci. 27, 561–590. (10.1207/s15516709cog2704_1) - DOI
-
- Levine J. 1983. Materialism and qualia: the explanatory gap. Pac. Phil. Q. 64, 354–361.
-
- Chalmers D. 1995. Facing up to the problem of consciousness. J. Conscious. Stud. 2, 200–219.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
