

Mechanisms of interpersonal sway synchrony and stability
- PMID: 25339686
- PMCID: PMC4223902
- DOI: 10.1098/rsif.2014.0751
Mechanisms of interpersonal sway synchrony and stability
Abstract
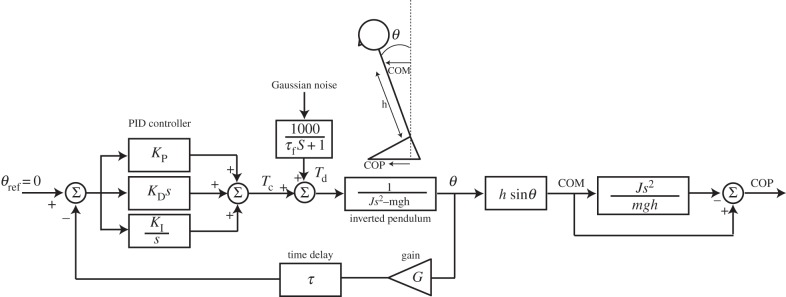
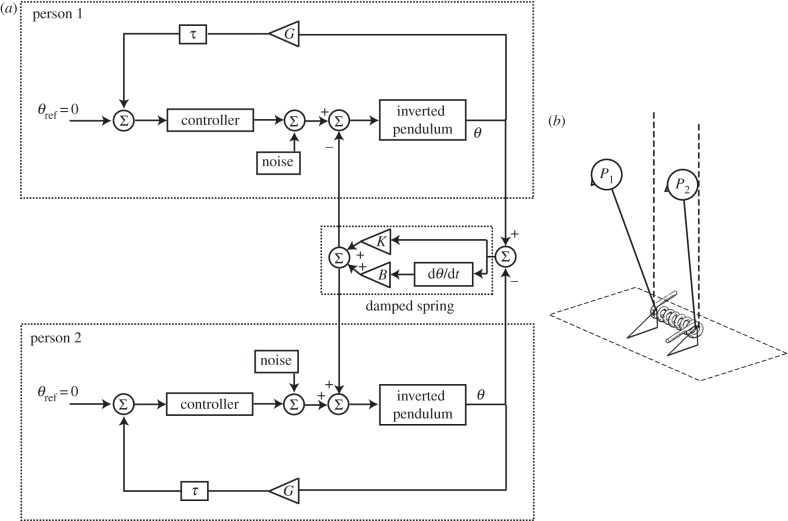
Here we explain the neural and mechanical mechanisms responsible for synchronizing sway and improving postural control during physical contact with another standing person. Postural control processes were modelled using an inverted pendulum under continuous feedback control. Interpersonal interactions were simulated either by coupling the sensory feedback loops or by physically coupling the pendulums with a damped spring. These simulations precisely recreated the timing and magnitude of sway interactions observed empirically. Effects of firmly grasping another person's shoulder were explained entirely by the mechanical linkage. This contrasted with light touch and/or visual contact, which were explained by a sensory weighting phenomenon; each person's estimate of upright was based on a weighted combination of veridical sensory feedback combined with a small contribution from their partner. Under these circumstances, the model predicted reductions in sway even without the need to distinguish between self and partner motion. Our findings explain the seemingly paradoxical observation that touching a swaying person can improve postural control.
Keywords: feedback model; interpersonal; posture.
Figures








References
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
