

Autonomous exoskeleton reduces metabolic cost of human walking
- PMID: 25367552
- PMCID: PMC4236484
- DOI: 10.1186/1743-0003-11-151
Autonomous exoskeleton reduces metabolic cost of human walking
Abstract
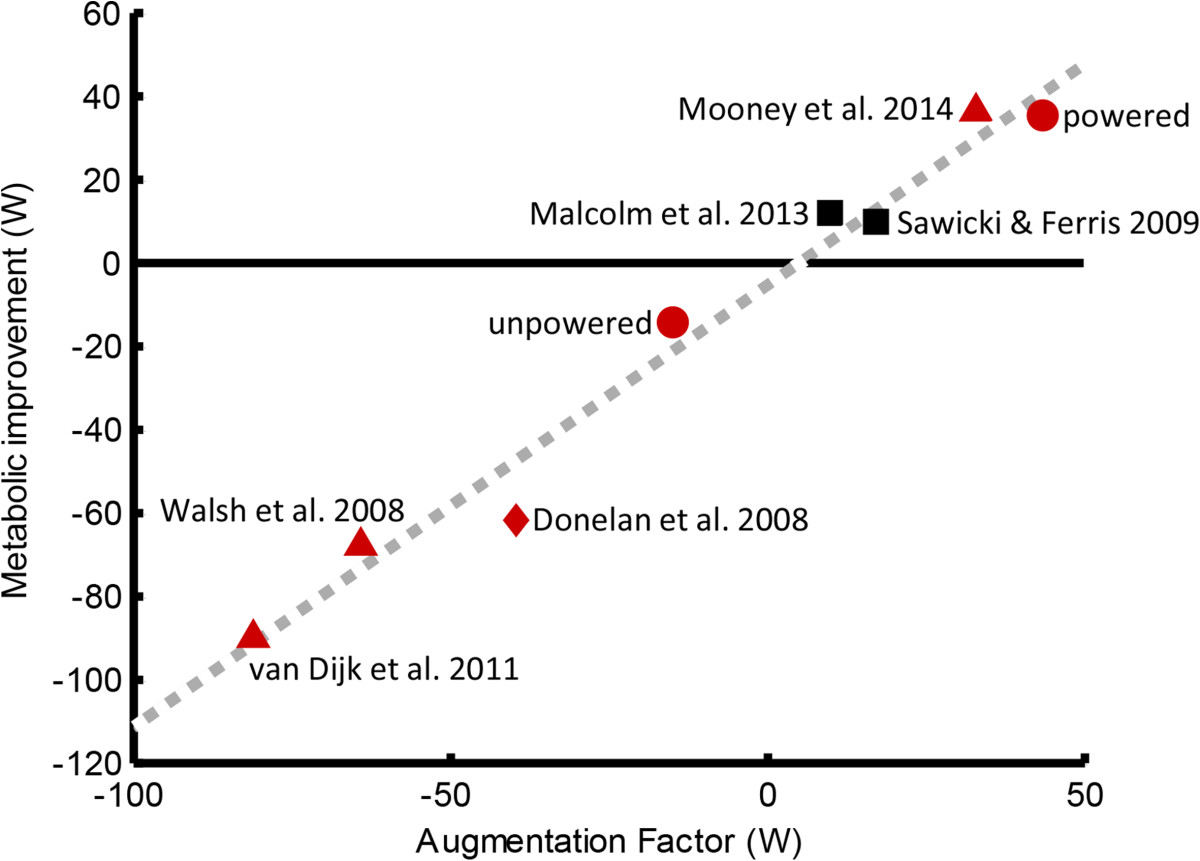
Background: Passive exoskeletons that assist with human locomotion are often lightweight and compact, but are unable to provide net mechanical power to the exoskeletal wearer. In contrast, powered exoskeletons often provide biologically appropriate levels of mechanical power, but the size and mass of their actuator/power source designs often lead to heavy and unwieldy devices. In this study, we extend the design and evaluation of a lightweight and powerful autonomous exoskeleton evaluated for loaded walking in (J Neuroeng Rehab 11:80, 2014) to the case of unloaded walking conditions.
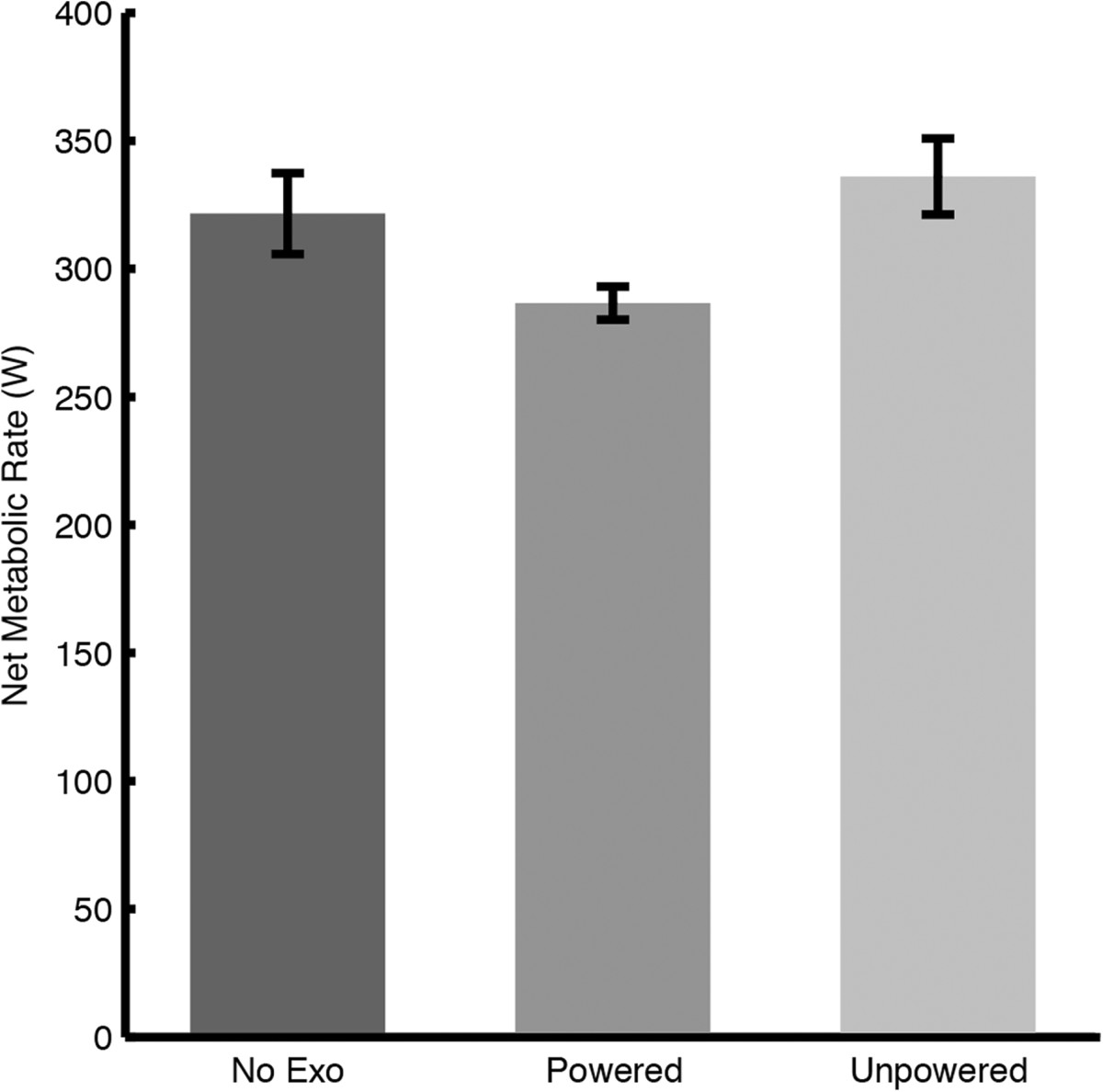
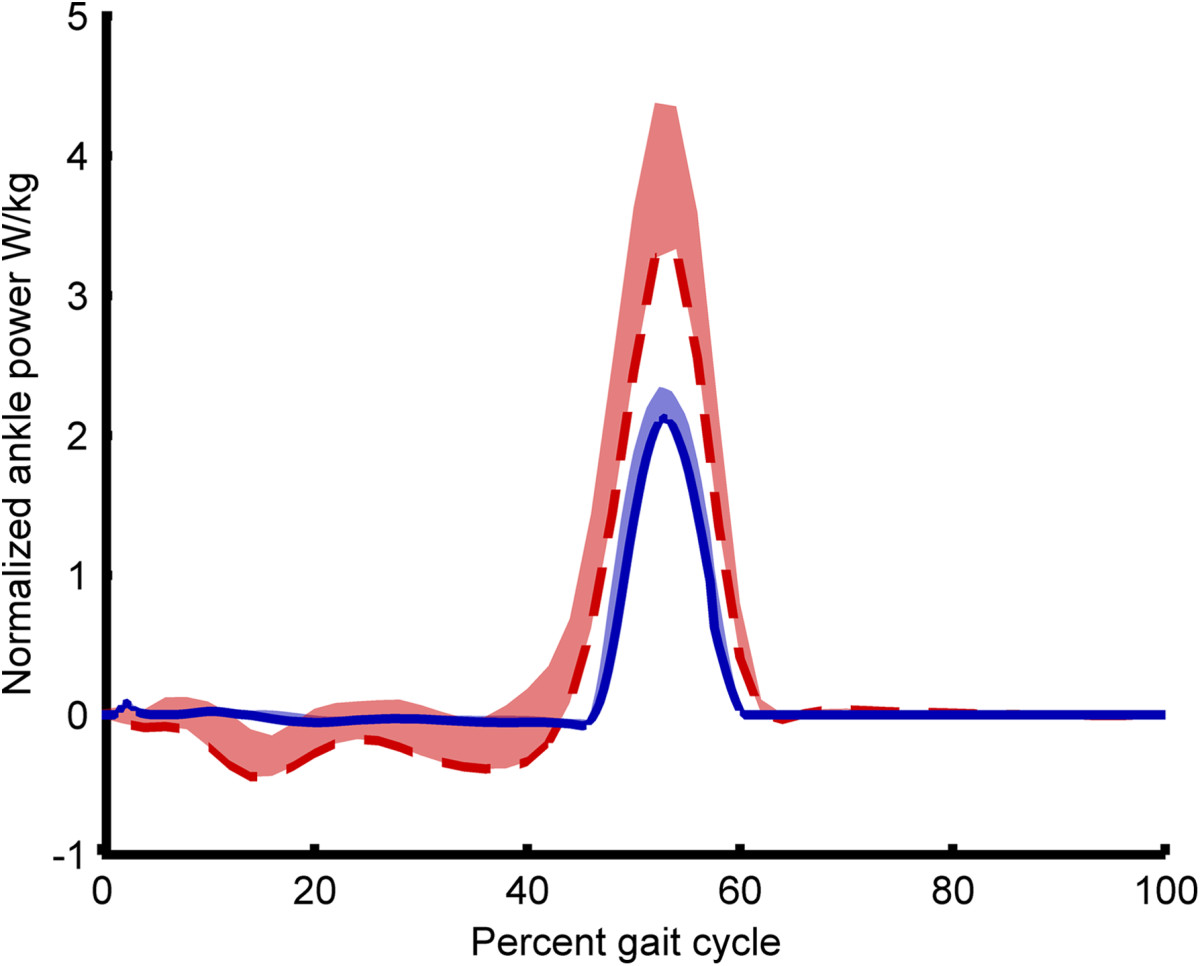
Findings: The metabolic energy consumption of seven study participants (85 ± 12 kg body mass) was measured while walking on a level treadmill at 1.4 m/s. Testing conditions included not wearing the exoskeleton and wearing the exoskeleton, in both powered and unpowered modes. When averaged across the gait cycle, the autonomous exoskeleton applied a mean positive mechanical power of 26 ± 1 W (13 W per ankle) with 2.12 kg of added exoskeletal foot-shank mass (1.06 kg per leg). Use of the leg exoskeleton significantly reduced the metabolic cost of walking by 35 ± 13 W, which was an improvement of 10 ± 3% (p = 0.023) relative to the control condition of not wearing the exoskeleton.
Conclusions: The results of this study highlight the advantages of developing lightweight and powerful exoskeletons that can comfortably assist the body during walking.
Figures

References
-
- Yagn N. Apparatus for facilitating walking, running, and jumping. 1890.
-
- Zoss A, Kazerooni H, Chu A. Biomechanical design of the Berkeley lower extremity exoskeleton (BLEEX) IEEE/ASME Trans Mechatronics. 2006;11:128–138. doi: 10.1109/TMECH.2006.871087. - DOI
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
