

A comparative analysis of three non-invasive human-machine interfaces for the disabled
- PMID: 25386135
- PMCID: PMC4209885
- DOI: 10.3389/fnbot.2014.00024
A comparative analysis of three non-invasive human-machine interfaces for the disabled
Abstract
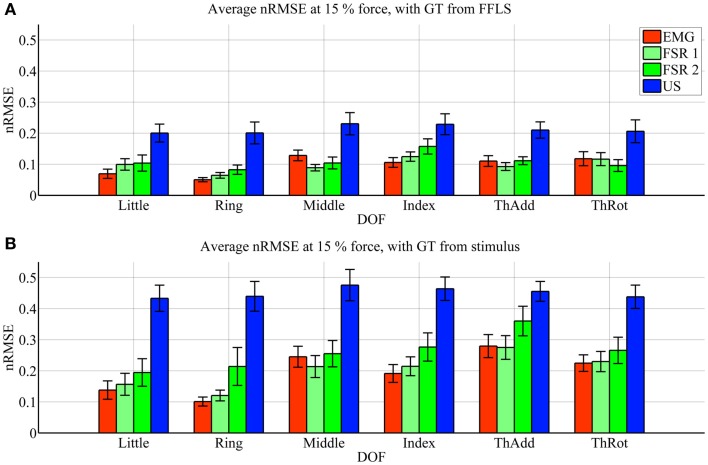
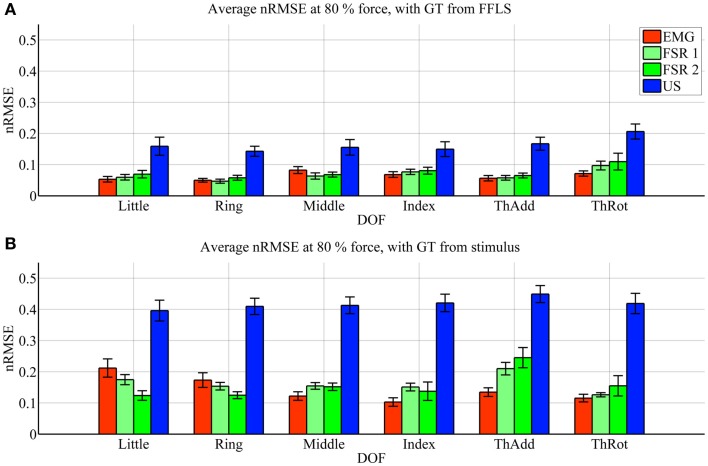
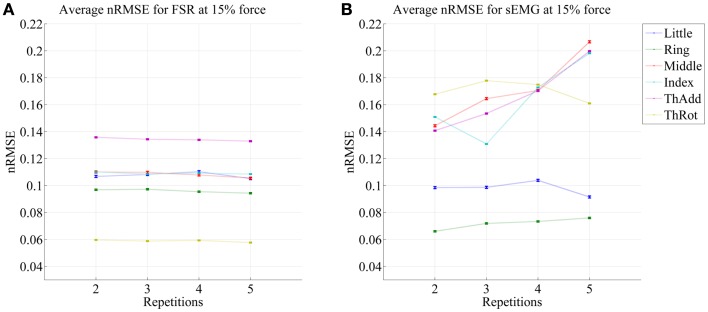
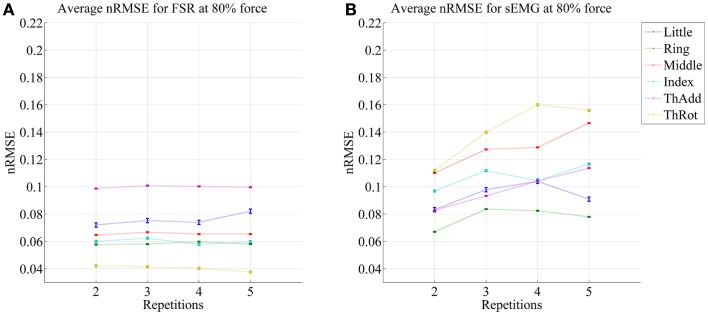
In the framework of rehabilitation robotics, a major role is played by the human-machine interface (HMI) used to gather the patient's intent from biological signals, and convert them into control signals for the robotic artifact. Surprisingly, decades of research have not yet declared what the optimal HMI is in this context; in particular, the traditional approach based upon surface electromyography (sEMG) still yields unreliable results due to the inherent variability of the signal. To overcome this problem, the scientific community has recently been advocating the discovery, analysis, and usage of novel HMIs to supersede or augment sEMG; a comparative analysis of such HMIs is therefore a very desirable investigation. In this paper, we compare three such HMIs employed in the detection of finger forces, namely sEMG, ultrasound imaging, and pressure sensing. The comparison is performed along four main lines: the accuracy in the prediction, the stability over time, the wearability, and the cost. A psychophysical experiment involving ten intact subjects engaged in a simple finger-flexion task was set up. Our results show that, at least in this experiment, pressure sensing and sEMG yield comparably good prediction accuracies as opposed to ultrasound imaging; and that pressure sensing enjoys a much better stability than sEMG. Given that pressure sensors are as wearable as sEMG electrodes but way cheaper, we claim that this HMI could represent a valid alternative/augmentation to sEMG to control a multi-fingered hand prosthesis.
Keywords: force control; human–machine interaction; incremental learning; machine learning; pressure sensing; rehabilitation robotics.
Figures


References
-
- Amsüss S., Goebel P., Graimann B., Farina D. (2014). “Extending mode switching to multiple degrees of freedom in hand prosthesis control is not efficient,” in Proceedings of the 36th Annual Conference of the IEEE Engineering in Medicine and Biology Society, EMBC, Chicago, IL - PubMed
-
- Boser B. E., Guyon I. M., Vapnik V. N. (1992). “A training algorithm for optimal margin classifiers,” in Proceedings of the 5th Annual ACM Workshop on Computational Learning Theory (COLT), ed. Haussler D. (New York, NY: ACM Press), 144–152
-
- Castellini C. (2014). “State of the art and perspectives of ultrasound imaging as a human-machine interface,” in Neuro-Robotics: From Brain-Machine Interfaces to Rehabilitation Robotics, Volume 2 of Trends in Augmentation of Human Performance, ed. Artemiadis P. (Dordrecht: Springer; ), 37–58
LinkOut - more resources
Full Text Sources
Other Literature Sources