

Ultrasound-guided three-dimensional needle steering in biological tissue with curved surfaces
- PMID: 25455165
- PMCID: PMC4409936
- DOI: 10.1016/j.medengphy.2014.10.005
Ultrasound-guided three-dimensional needle steering in biological tissue with curved surfaces
Abstract
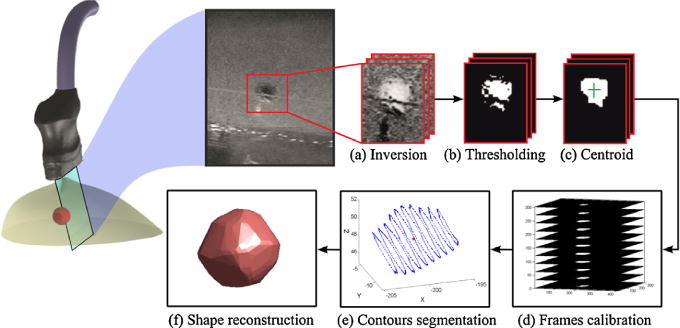
In this paper, we present a system capable of automatically steering a bevel-tipped flexible needle under ultrasound guidance toward a physical target while avoiding a physical obstacle embedded in gelatin phantoms and biological tissue with curved surfaces. An ultrasound pre-operative scan is performed for three-dimensional (3D) target localization and shape reconstruction. A controller based on implicit force control is developed to align the transducer with curved surfaces to assure the maximum contact area, and thus obtain an image of sufficient quality. We experimentally investigate the effect of needle insertion system parameters such as insertion speed, needle diameter and bevel angle on target motion to adjust the parameters that minimize the target motion during insertion. A fast sampling-based path planner is used to compute and periodically update a feasible path to the target that avoids obstacles. We present experimental results for target reconstruction and needle insertion procedures in gelatin-based phantoms and biological tissue. Mean targeting errors of 1.46±0.37 mm, 1.29±0.29 mm and 1.82±0.58 mm are obtained for phantoms with inclined, curved and combined (inclined and curved) surfaces, respectively, for insertion distance of 86-103 mm. The achieved targeting errors suggest that our approach is sufficient for targeting lesions of 3mm radius that can be detected using clinical ultrasound imaging systems.
Keywords: Computer-assisted surgery; Minimally invasive procedures; Needle steering; Ultrasound.
Copyright © 2014 IPEM. Published by Elsevier Ltd. All rights reserved.
Conflict of interest statement
This is to certify that the authors have no financial or personal relationships with other people or organizations that would inappropriately influence our work.
Figures




References
-
- Prager RW, Ijaz UZ, Gee AH, Treece GM. Three-dimensional ultrasound imaging. Proceedings of the Institution of Mechanical Engineers, Part H. J Eng Med. 2010;224(2):193–223. - PubMed
-
- Riviere CN, Thakral A, Iordachita II, Mitroi G, Stoianovici D. Predicting respiratory motion for active canceling during percutaneous needle insertion. Proceedings of the IEEE International Conference in Medicine and Biology Society (EMBS) 2001;4:3477–80.
-
- Abolhassani N, Patel RV. Deflection of a flexible needle during insertion into soft tissue. Proceedings of the IEEE International Conference on Engineering in Medicine and Biology Society (EMBS) 2006:3858–61. - PubMed
-
- Abayazid M, op den Buijs J, de Korte CL, Misra S. Effect of skin thickness on target motion during needle insertion into soft-tissue phantoms. Proceedings of the IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob) 2012:755–60.
Publication types
MeSH terms
Substances
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
