

Effects of vibrotactile feedback on human learning of arm motions
- PMID: 25486644
- PMCID: PMC4623827
- DOI: 10.1109/TNSRE.2014.2327229
Effects of vibrotactile feedback on human learning of arm motions
Abstract
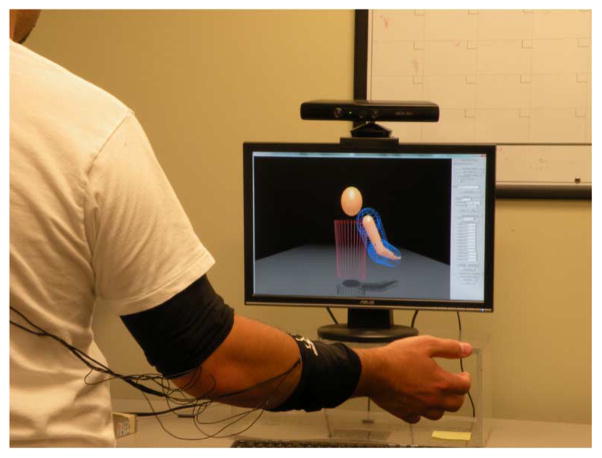
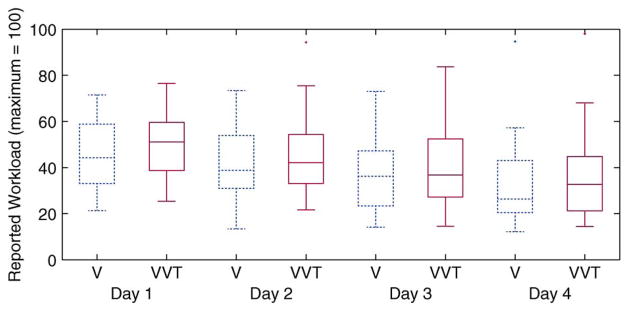
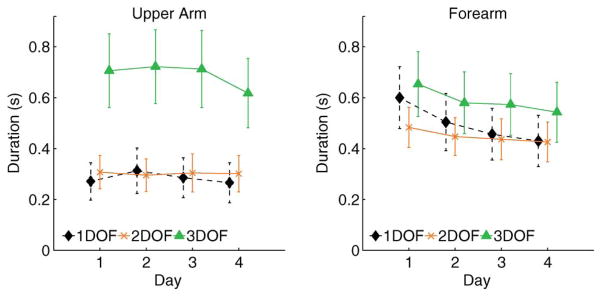
Tactile cues generated from lightweight, wearable actuators can help users learn new motions by providing immediate feedback on when and how to correct their movements. We present a vibrotactile motion guidance system that measures arm motions and provides vibration feedback when the user deviates from a desired trajectory. A study was conducted to test the effects of vibrotactile guidance on a subject's ability to learn arm motions. Twenty-six subjects learned motions of varying difficulty with both visual (V), and visual and vibrotactile (VVT) feedback over the course of four days of training. After four days of rest, subjects returned to perform the motions from memory with no feedback. We found that augmenting visual feedback with vibrotactile feedback helped subjects reduce the root mean square (rms) angle error of their limb significantly while they were learning the motions, particularly for 1DOF motions. Analysis of the retention data showed no significant difference in rms angle errors between feedback conditions.
Figures









References
-
- Spelmezan D, Schanowski A, Borchers J. Wearable automatic feedback devices for physical activities. Proc Int Conf Body Area Netw. 2009:1:1–1:8.
-
- Ruffaldi E, Filippeschi A, Avizzano CA, Bardy B, Gopher D, Bergamasco M. Feedback, affordances, accelerators for training sports in virtual environments. Presence-Teleop Virt. 2011;20(1):33–46.
-
- van Erp JBF, Saturday I, Jansen C. Application of tactile displays in sports: Where to, how and when to move. Proc Eurohapt. 2006 Mar;:105–109.
-
- Ruffaldi E, Filippeschi A, Frisoli A, Sandoval O, Avizzano C, Bergamasco M. Vibrotactile perception assessment for a rowing training system. Proc IEEE World Haptics Conf. 2009:350–355.
-
- Pakkanen T, Lylykangas J, Raisamo J, Raisamo R, Salminen K, Rantala J, Surakka V. Perception of low-amplitude haptic stimuli when biking. Proc Int Conf Multimodal Interfaces. 2008:281–284.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
