

Non-invasive control interfaces for intention detection in active movement-assistive devices
- PMID: 25516421
- PMCID: PMC4459663
- DOI: 10.1186/1743-0003-11-168
Non-invasive control interfaces for intention detection in active movement-assistive devices
Abstract
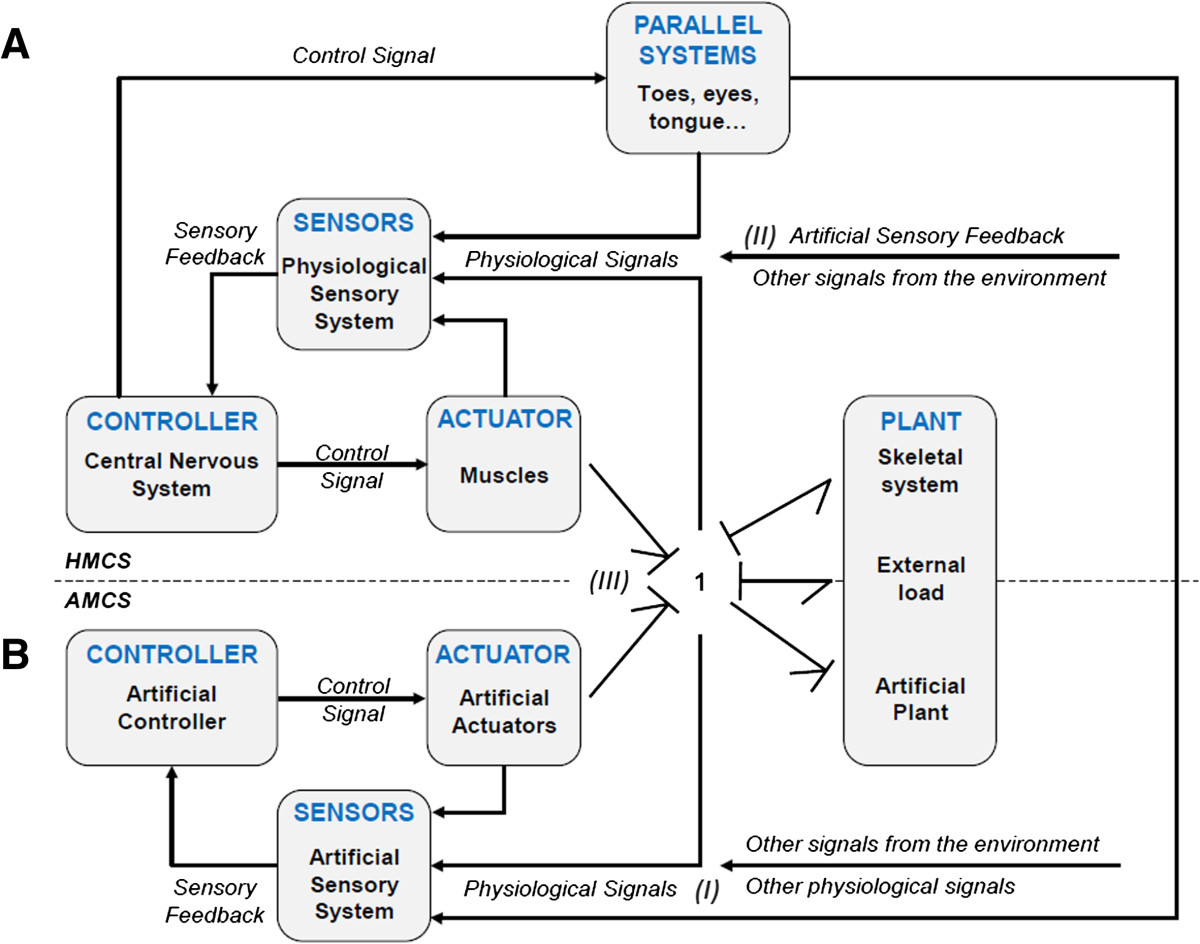
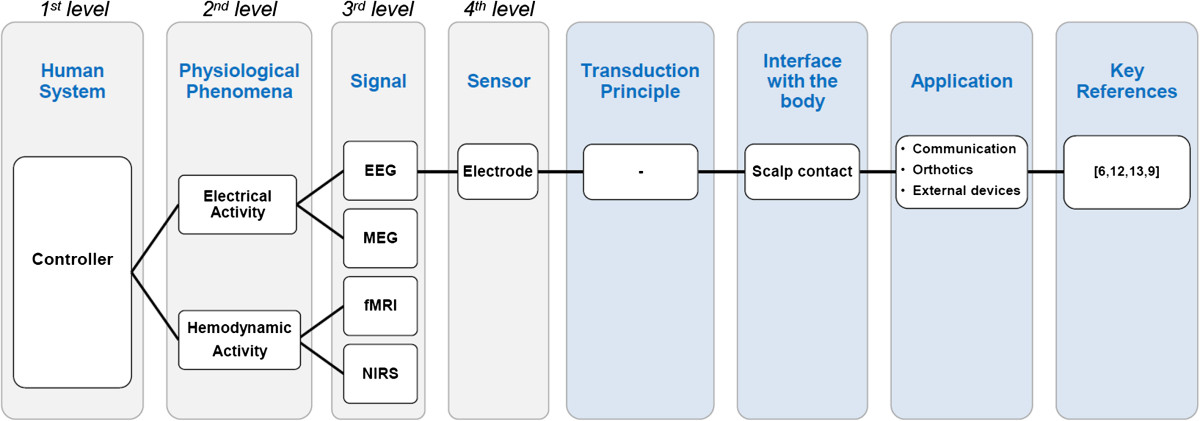
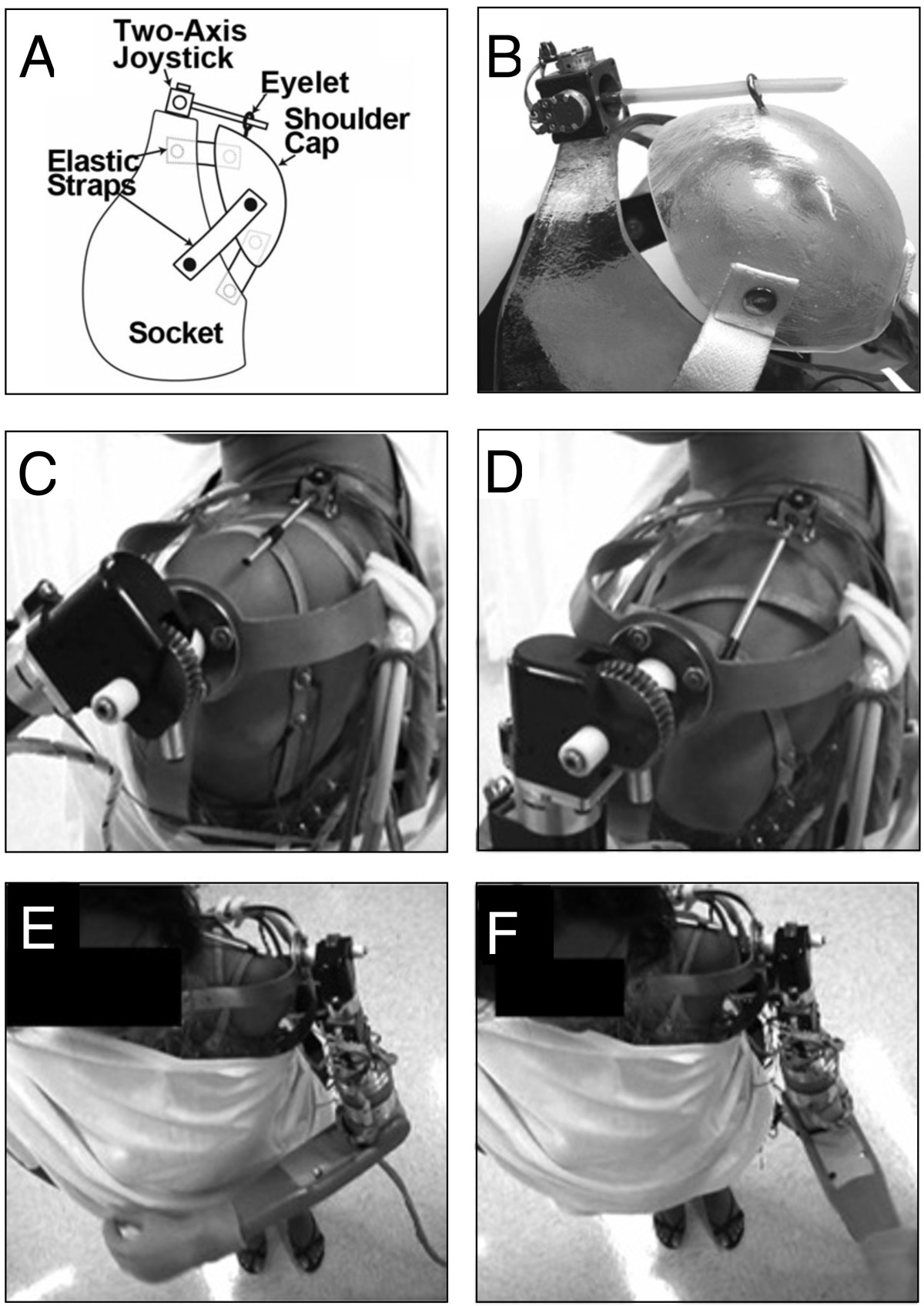
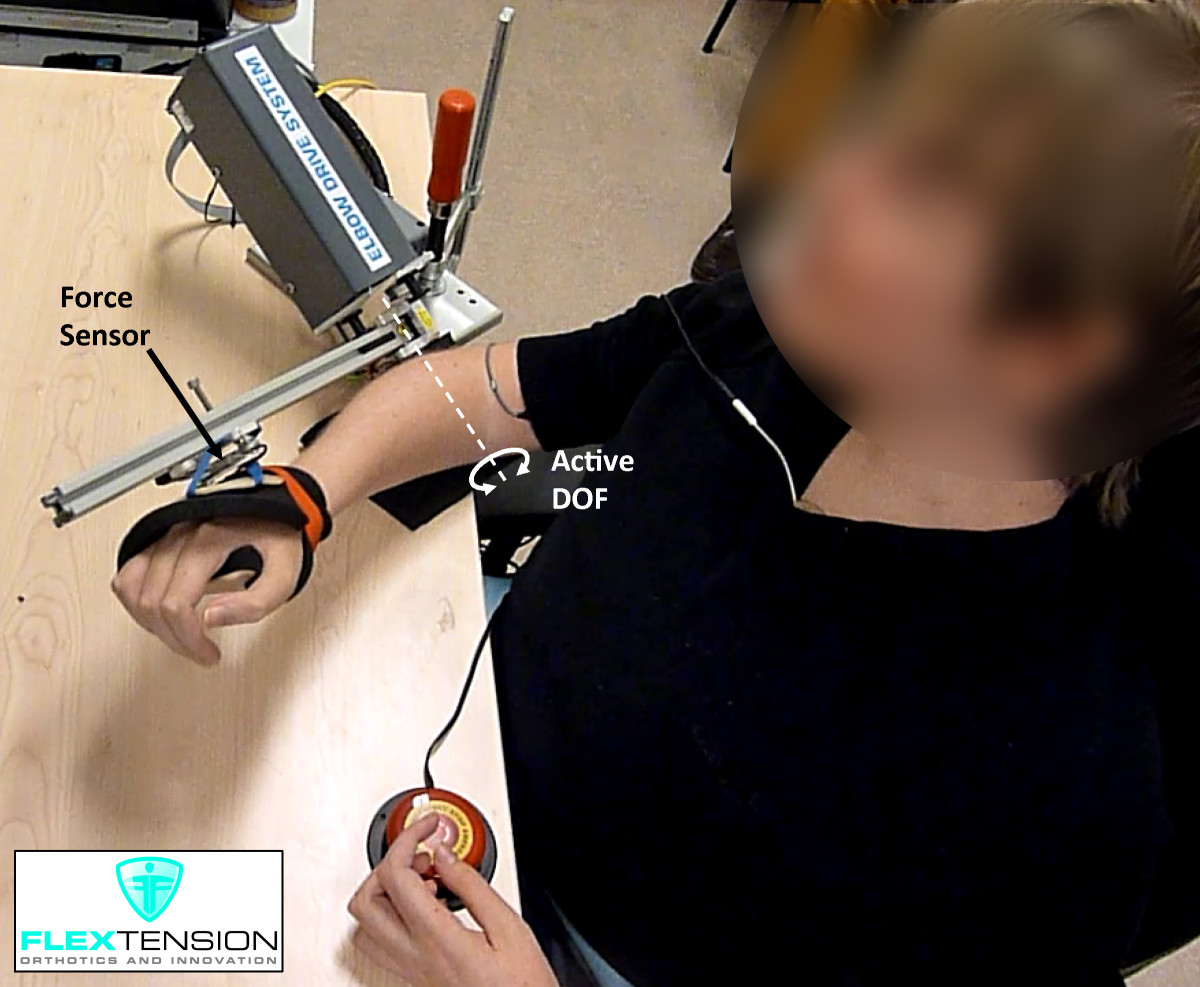
Active movement-assistive devices aim to increase the quality of life for patients with neuromusculoskeletal disorders. This technology requires interaction between the user and the device through a control interface that detects the user's movement intention. Researchers have explored a wide variety of invasive and non-invasive control interfaces. To summarize the wide spectrum of strategies, this paper presents a comprehensive review focused on non-invasive control interfaces used to operate active movement-assistive devices. A novel systematic classification method is proposed to categorize the control interfaces based on: (I) the source of the physiological signal, (II) the physiological phenomena responsible for generating the signal, and (III) the sensors used to measure the physiological signal. The proposed classification method can successfully categorize all the existing control interfaces providing a comprehensive overview of the state of the art. Each sensing modality is briefly described in the body of the paper following the same structure used in the classification method. Furthermore, we discuss several design considerations, challenges, and future directions of non-invasive control interfaces for active movement-assistive devices.
Figures


References
-
- Veltink PH. Sensory feedback in artificial control of human mobility. Technol Health Care. 1999;7:383–391. - PubMed
-
- Borutzky W. Bond Graph Methodology: Development and Analysis of Multidisciplinary Dynamic System Models. Switzerland: Springer International publisher; 2010.
-
- Dollar AM, Herr H. Lower extremity exoskeletons and active orthoses: challenges and state-of-the-Art. IEEE Trans Robot. 2008;24:144–158. doi: 10.1109/TRO.2008.915453. - DOI
-
- Pons JL. Wearable Robots: Biomechatronic Exoskeletons. 1 2008.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
