

Evolution of integrated causal structures in animats exposed to environments of increasing complexity
- PMID: 25521484
- PMCID: PMC4270440
- DOI: 10.1371/journal.pcbi.1003966
Evolution of integrated causal structures in animats exposed to environments of increasing complexity
Abstract
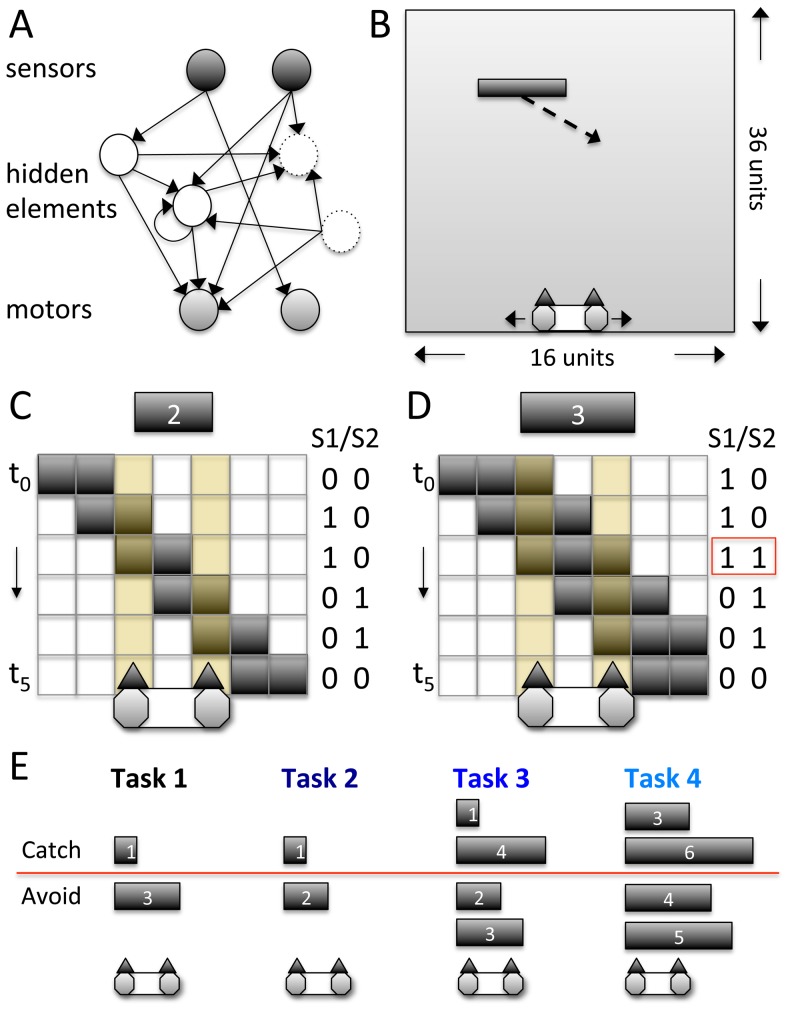
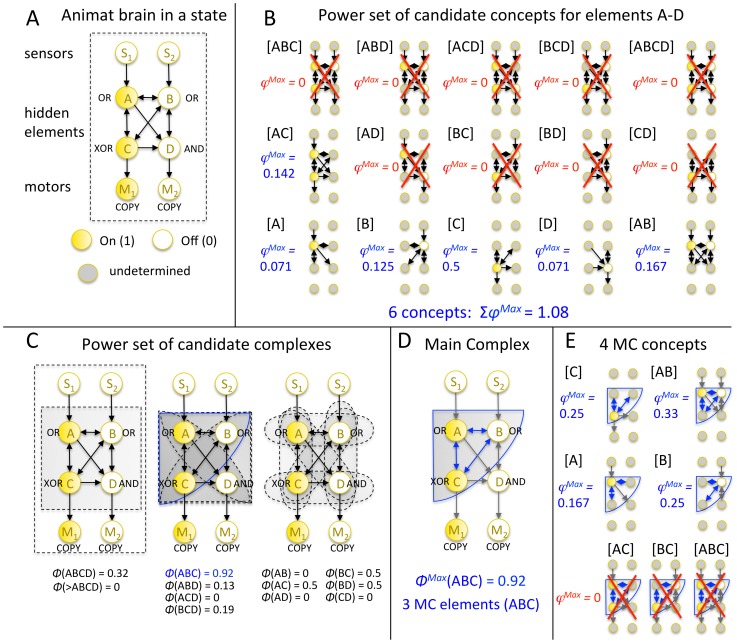
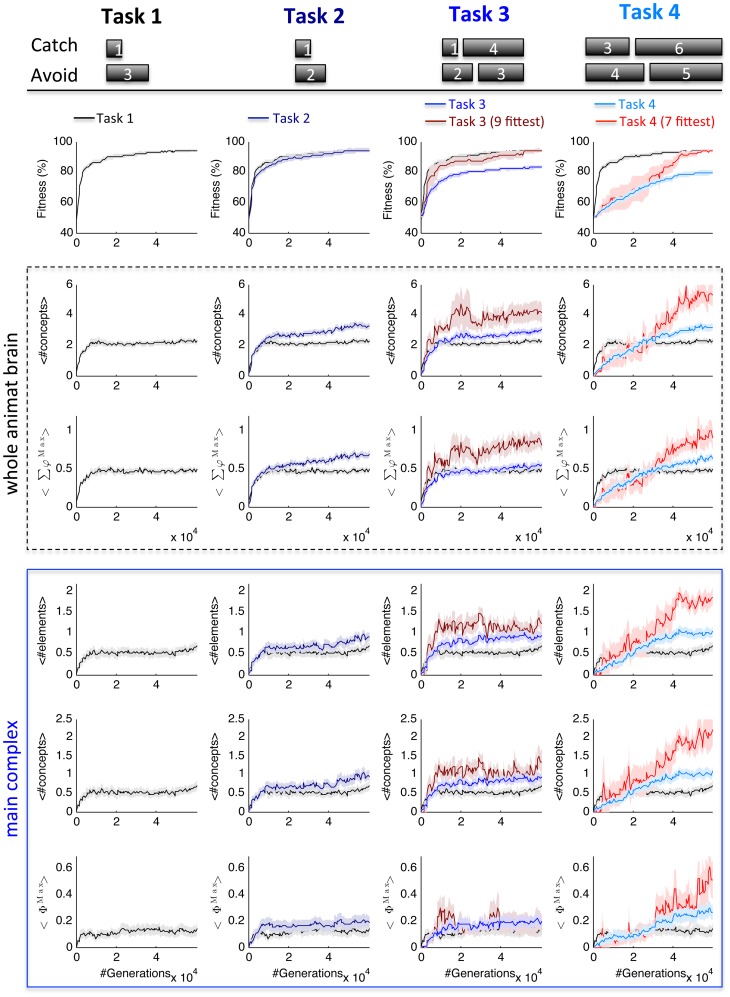
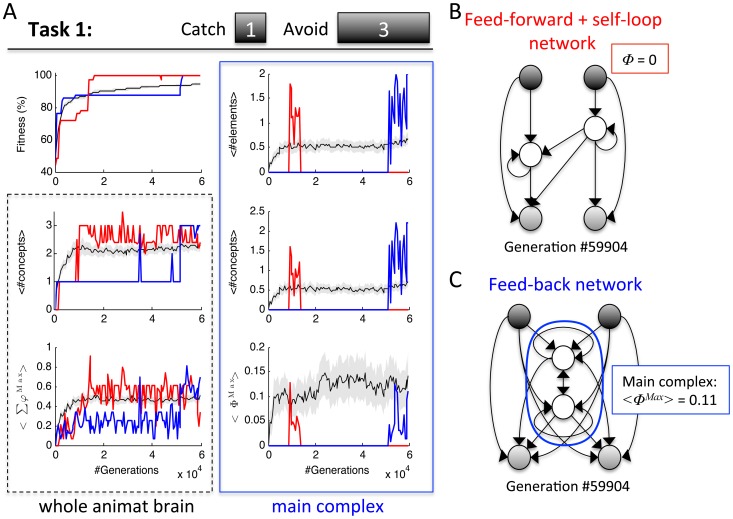
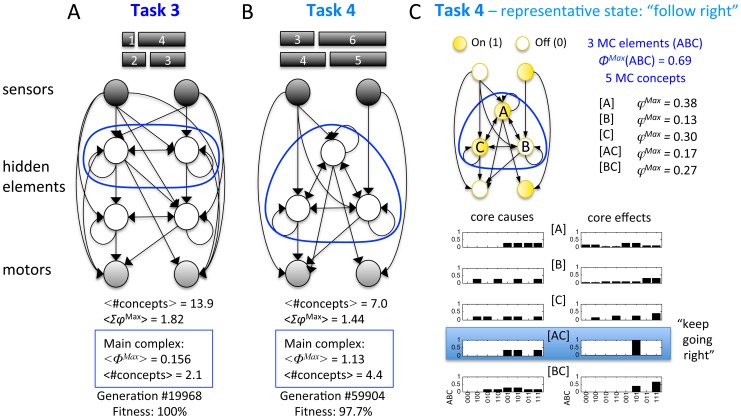
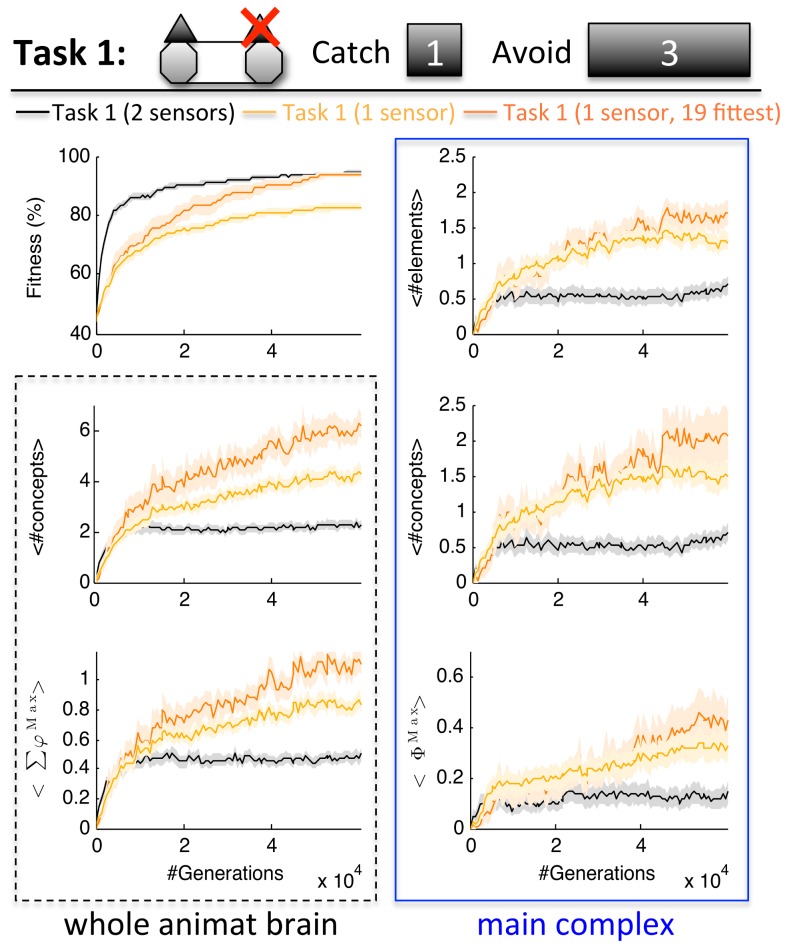
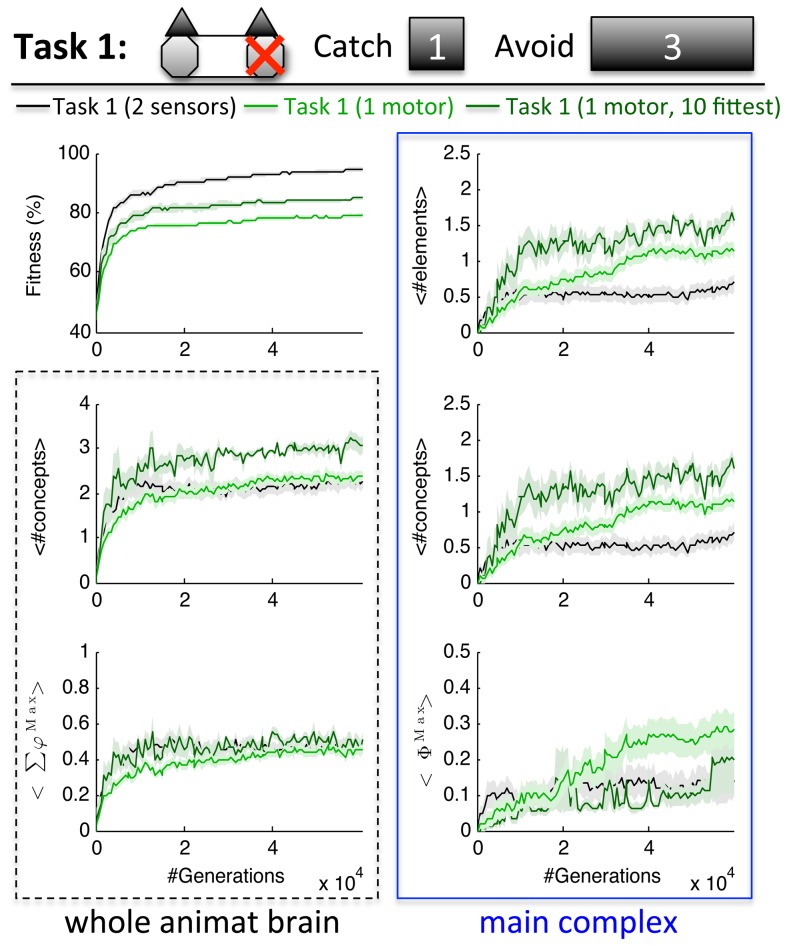
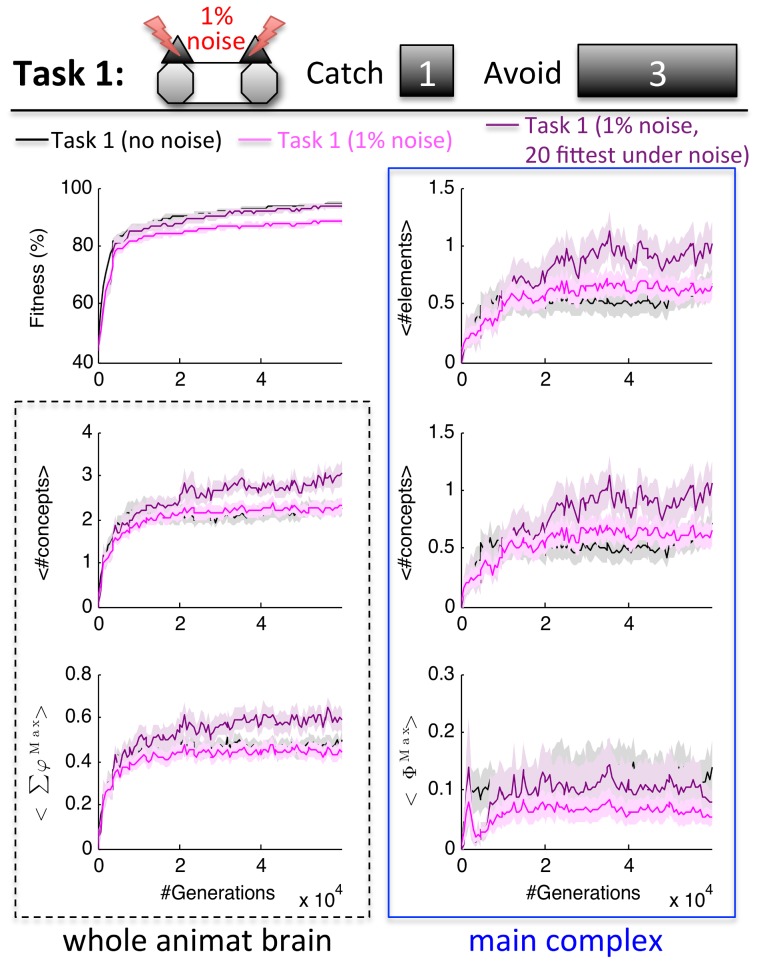
Natural selection favors the evolution of brains that can capture fitness-relevant features of the environment's causal structure. We investigated the evolution of small, adaptive logic-gate networks ("animats") in task environments where falling blocks of different sizes have to be caught or avoided in a 'Tetris-like' game. Solving these tasks requires the integration of sensor inputs and memory. Evolved networks were evaluated using measures of information integration, including the number of evolved concepts and the total amount of integrated conceptual information. The results show that, over the course of the animats' adaptation, i) the number of concepts grows; ii) integrated conceptual information increases; iii) this increase depends on the complexity of the environment, especially on the requirement for sequential memory. These results suggest that the need to capture the causal structure of a rich environment, given limited sensors and internal mechanisms, is an important driving force for organisms to develop highly integrated networks ("brains") with many concepts, leading to an increase in their internal complexity.
Conflict of interest statement
The authors have declared that no competing interests exist.
Figures
References
-
- Maynard Smith J (2000) The Concept of Information in Biology. Philos Sci 67: 177–194.
-
- Rivoire O, Leibler S (2011) The Value of Information for Populations in Varying Environments. J Stat Phys 142: 1124–1166 10.1007/s10955-011-0166-2 - DOI
-
- Taylor SF, Tishby N, Bialek W (2007) Information and fitness.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
