

doi: 10.1016/j.mechmachtheory.2013.11.012.
Correcting Duporcq's theorem
Affiliations
- PMID: 25540467
- PMCID: PMC4270477
- DOI: 10.1016/j.mechmachtheory.2013.11.012
Item in Clipboard
Correcting Duporcq's theorem
Mech Mach Theory.
2014 Mar.
Abstract
In 1898, Ernest Duporcq stated a famous theorem about rigid-body motions with spherical trajectories, without giving a rigorous proof. Today, this theorem is again of interest, as it is strongly connected with the topic of self-motions of planar Stewart-Gough platforms. We discuss Duporcq's theorem from this point of view and demonstrate that it is not correct. Moreover, we also present a revised version of this theorem.
Keywords: Architectural singularity; Borel Bricard problem; Self-motion; Stewart–Gough platform.
Figures

a) Sketch of the cubics Γ3 and Γ4 and their intersection points 1, …, 6, α, β, γ. b) It is well known (cf. page 166 of [10]), that the bisecting planes εi of corresponding points a1 ∈ P1 and ai ∈ Pi are related with the midpoints bi of the segment a1ai by a null-polarity (for i = 2, 3). Therefore, the mapping from a ∈ P to the intersection line Ai of εi an P′ is a correlation. The intersection point of A2 and A3 is equivalent with the intersection point of the axis of the circumcircle of a1, a2, a3 and P′.

a) A planar architecturally singular SG platform is given, where the platform anchor points mi and the base anchor points Mi are related by a non-singular projectivity κ; i.e. miκ = Mi for i = 1, …, 6 (cf. Theorem 2). b) It is well known (e.g. Section 3.1 of [12]), that planar architecturally singular SG platforms are redundant. Therefore they possess a self-motion in each pose. It can easily be seen by the above given example, that this only holds over ℂ: In the illustrated pose the platform and the base coincide as well as the centers of the two circles c and cκ (κ is a similarity).

Given is a 5-legged manipulator with m1,2,3,4 := m1 = m2 = m3 = m4. This manipulator is degenerated (cf. [14]) and possess a two-parametric spherical self-motion with center m1,2,3,4. By adding any leg with anchor points m6 ∈ P and M6 ∈ P′, we always obtain a planar architecturally singular SG platform: a) In the general case, the sixth leg restricts the self-motion to a one-dimensional one. b) If we choose m6 = m1,2,3,4, the resulting SG platform has the same solution for the direct kinematics as the given 5-legged one.
a) Sketch of the Darboux condition. b) Sketch of the Mannheim condition.

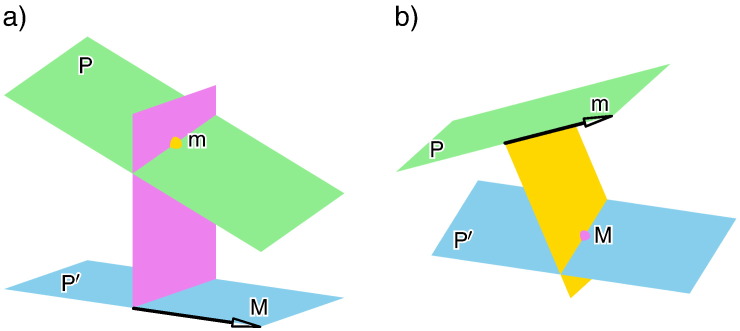
a) The reflection of m, with respect to an finite plane ε through M, can easily be done by considering m as the ideal point of a line g. Then the reflected point is the ideal point of the reflected line with respect to ε. b) The obtained set of points are the ideal points of a cone of revolution Ψ with half apex angle φ and where M is located on the axis of revolution.

Special case: a) Sketch of the platform. b) Sketch of the base.

Axonometric view of the 5-legged manipulator in its initial pose.
References
-
- Duporcq E. Sur la correspondance quadratique et rationnelle de deux figures planes et sur un déplacement remarquable. C. R. Seances Acad. Sci. 1898;126:1405–1406.
-
- Emch A. In: Selected Topics in Algebraic Geometry. Snyder V., editor. Vol. 63. 1928. Quadratic cremona transformations; pp. 13–55. (Bulletin of the National Research Council).
-
- Forder H.G. Chelsea Publishing Company; New York: 1960. The Calculus of Extension.
-
- Husty M. In: International Symposium on History of Machines and Mechanisms. Ceccarelli M., editor. Kluwer; 2000. E. Borel's and R. Bricard's Papers on displacements with spherical paths and their relevance to self-motions of parallel manipulators; pp. 163–172.
-
- Karger A. Parallel manipulators and Borel–Bricard's problem. Comput. Aided Geom. Des. 2010;27(8):669–680.
LinkOut - more resources
Full Text Sources
Other Literature Sources