

Toward a new generation of electrically controllable hygromorphic soft actuators
- PMID: 25556552
- PMCID: PMC4369129
- DOI: 10.1002/adma.201404772
Toward a new generation of electrically controllable hygromorphic soft actuators
Abstract
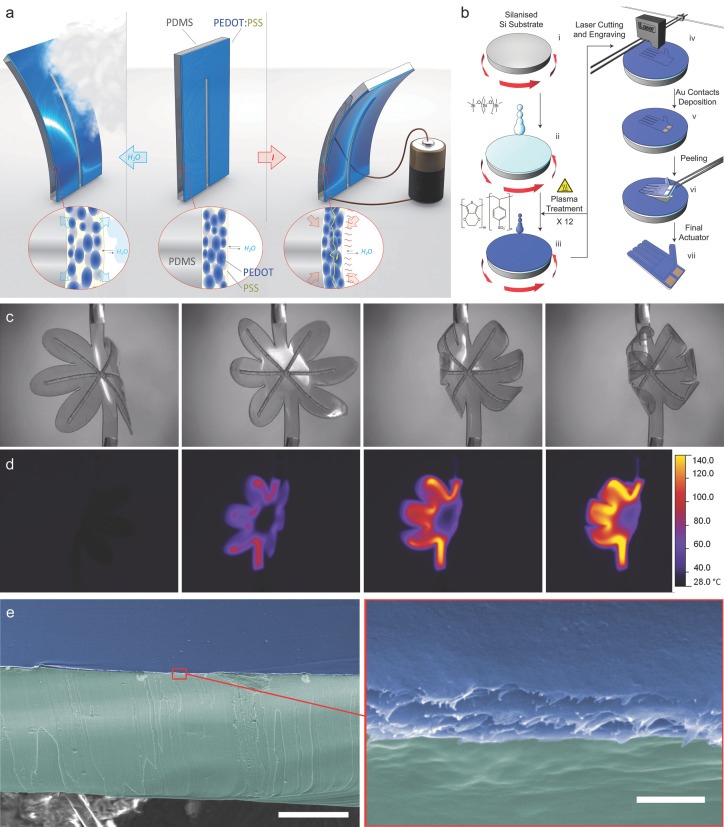
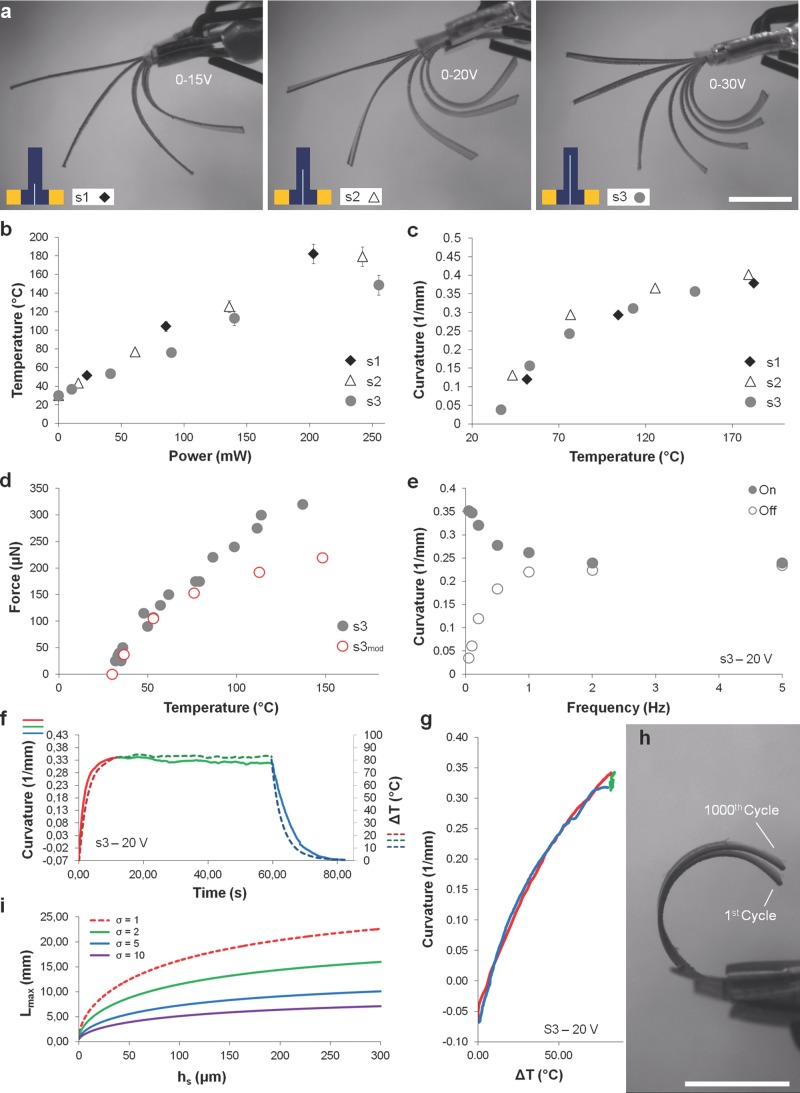
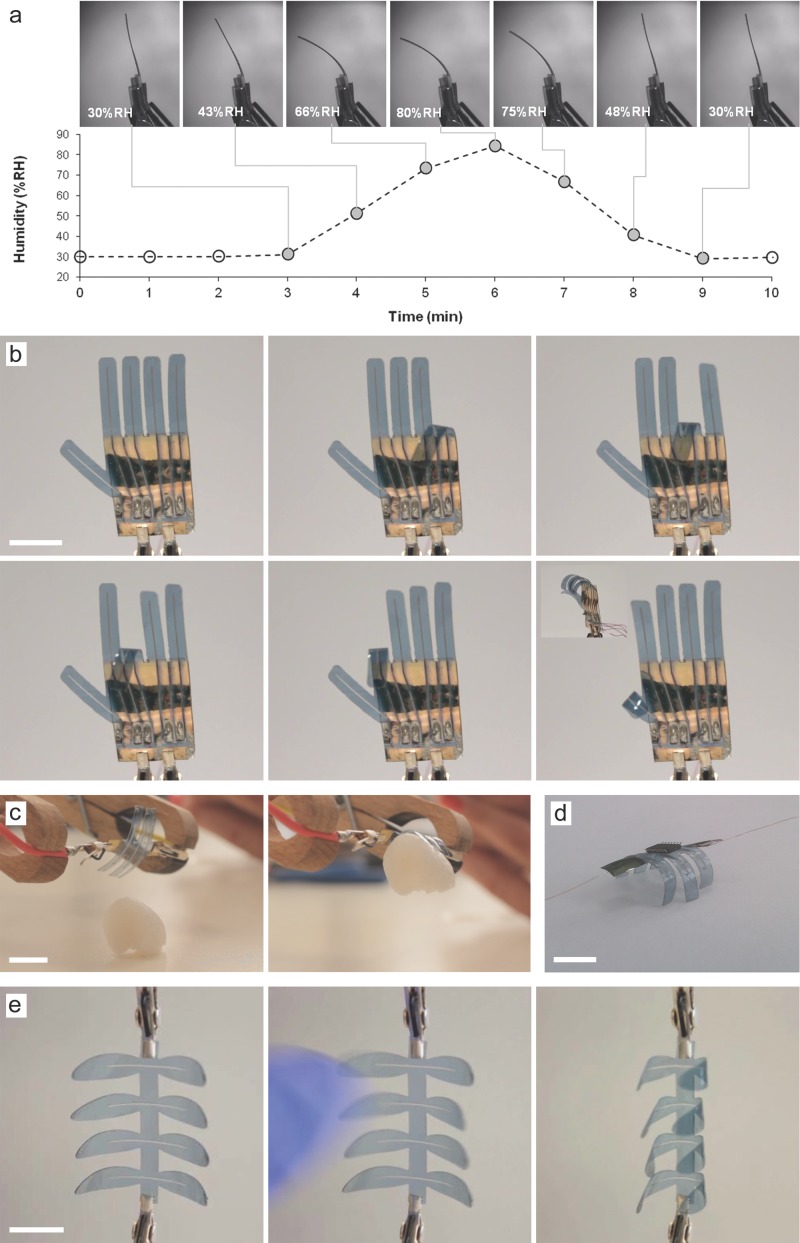
An innovative processing strategy for fabricating soft structures that possess electric- and humidity-driven active/passive actuation capabilities along with touch- and humidity-sensing properties is reported. The intrinsically multifunctional material comprises an active thin layer of poly(3,4-ethylenedioxythiophene):poly-(styrene sulfonate) in a double-layered structure with a silicone elastomer and provides an opportunity toward developing a new class of smart structures for soft robotics.
Keywords: conducting polymers; hygromorphic materials; poly(3,4ethylenedioxythiophene):polystyrene sulfonate; soft actuators; stimuli-responsive materials.
© 2015 The Authors. Published by WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim.
Figures
References
-
- Minko S. Responsive Polymer Materials: Design and Applications. Ames, IA, USA: Wiley-Blackwell; 2006. p. 101.
-
- Cohen Stuart MA, Huck WTS, Genzer J, Müller M, Ober C, Stamm M, Sukhorukov GB, Szleifer I, Tsukruk VV, Urban M, Winnik F, Zauscher S, Luzinov I, Minko Sergiy. Nat. Mater. 2010;9 - PubMed
-
- Jager EWH, Smela E, Inganäs O. Science. 2000;290:1540. - PubMed
-
- Carpi F, Smela E. Biomedical Applications of Electroactive Polymer Actuators. Chichester, UK: John Wiley & Sons; 2009.
-
- Otero TF. Polym. Rev. 2013;53
Publication types
MeSH terms
Substances
LinkOut - more resources
Full Text Sources
Other Literature Sources
Molecular Biology Databases
