

Control strategies for active lower extremity prosthetics and orthotics: a review
- PMID: 25557982
- PMCID: PMC4326520
- DOI: 10.1186/1743-0003-12-1
Control strategies for active lower extremity prosthetics and orthotics: a review
Abstract
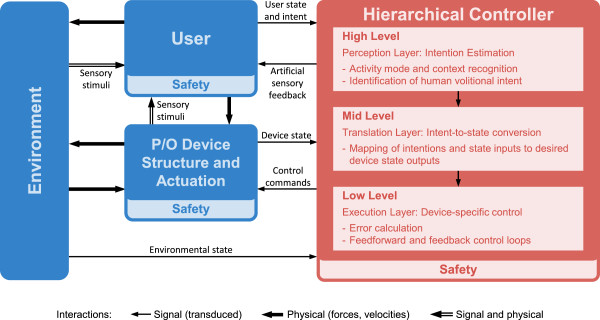
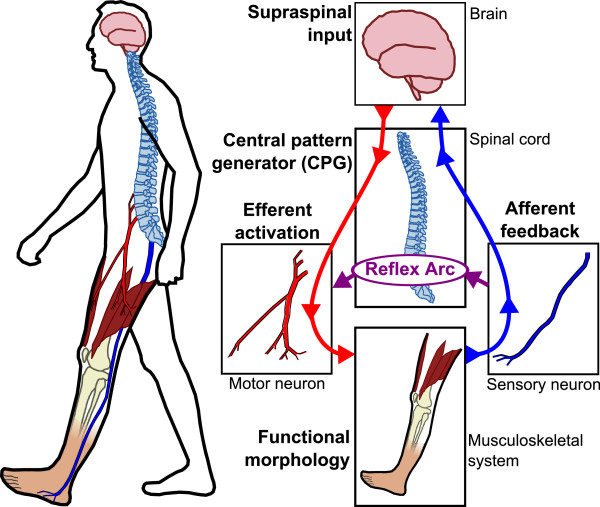
: Technological advancements have led to the development of numerous wearable robotic devices for the physical assistance and restoration of human locomotion. While many challenges remain with respect to the mechanical design of such devices, it is at least equally challenging and important to develop strategies to control them in concert with the intentions of the user.This work reviews the state-of-the-art techniques for controlling portable active lower limb prosthetic and orthotic (P/O) devices in the context of locomotive activities of daily living (ADL), and considers how these can be interfaced with the user's sensory-motor control system. This review underscores the practical challenges and opportunities associated with P/O control, which can be used to accelerate future developments in this field. Furthermore, this work provides a classification scheme for the comparison of the various control strategies.As a novel contribution, a general framework for the control of portable gait-assistance devices is proposed. This framework accounts for the physical and informatic interactions between the controller, the user, the environment, and the mechanical device itself. Such a treatment of P/Os--not as independent devices, but as actors within an ecosystem--is suggested to be necessary to structure the next generation of intelligent and multifunctional controllers.Each element of the proposed framework is discussed with respect to the role that it plays in the assistance of locomotion, along with how its states can be sensed as inputs to the controller. The reviewed controllers are shown to fit within different levels of a hierarchical scheme, which loosely resembles the structure and functionality of the nominal human central nervous system (CNS). Active and passive safety mechanisms are considered to be central aspects underlying all of P/O design and control, and are shown to be critical for regulatory approval of such devices for real-world use.The works discussed herein provide evidence that, while we are getting ever closer, significant challenges still exist for the development of controllers for portable powered P/O devices that can seamlessly integrate with the user's neuromusculoskeletal system and are practical for use in locomotive ADL.
Figures
References
-
- Seymour R. Prosthetics and orthotics: lower limb And spinal. Philadelphia: Lippincott, Williams & Wilkins; 2002.
-
- Au SK, Weber J, Herr H. Powered ankle–foot prosthesis improves walking metabolic economy. Robot IEEE Trans. 2009;25(1):51–66.
-
- Martinez-Villalpando EC, Mooney L, Elliott G, Herr H. Engineering in medicine and biology society (EMBS), 2011 Annual international conference of the IEEE, 2011. Antagonistic active knee prosthesis. a metabolic cost of walking comparison with a variable-damping prosthetic knee. - PubMed
-
- Cohen JE. Human population: the next half century. Science. 2003;302(5648):1172–5. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
