

Characterization of wheelchair maneuvers based on noisy inertial sensor data: a preliminary study
- PMID: 25570310
- PMCID: PMC4795478
- DOI: 10.1109/EMBC.2014.6943942
Characterization of wheelchair maneuvers based on noisy inertial sensor data: a preliminary study
Abstract
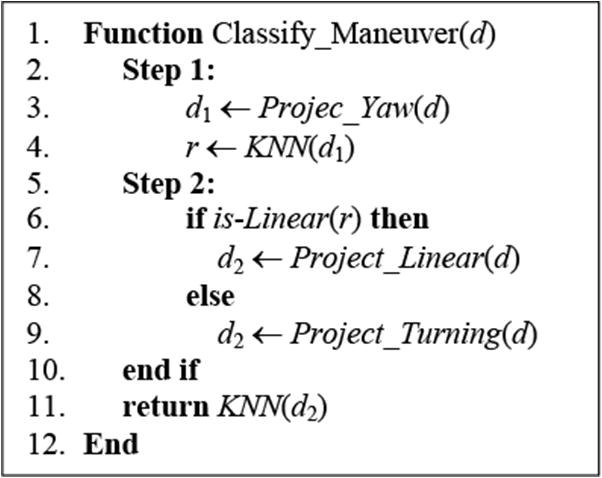
A wheelchair user's activity and mobility level is an important indicator of his/her quality of life and health status. To assess the activity and mobility level, wheelchair maneuvering data must be captured and analyzed. Recently, the inertial sensors, such as accelerometers, have been used to collect wheelchair maneuvering data. However, these sensors are sensitive to noises, which can lead to inaccurate analysis results. In this study, we analyzed the characteristics of wheelchair maneuvering data and developed a novel machine-learning algorithm, which could classify wheelchair maneuvering data into a series of wheelchair maneuvers. The use of machine-learning techniques empowers our approach to tolerate noises by capturing the patterns of wheelchair maneuvers. Experimental results showed that the proposed algorithm could accurately classify wheelchair maneuvers into eight classes, i.e., stationary, linear acceleration/deceleration, linear constant speed, left/right turns, and left/right spot turns. The fine-grained analysis on wheelchair maneuvering data can depict a more comprehensive picture of wheelchair users' activity and mobility levels, and enable the quantitative analysis of their quality of life and health status.
Figures


References
-
- Tolerico ML, Ding D, Cooper RA, Spaeth DM, Fitzgerald SG, Cooper R, et al. Assessing mobility characteristics and activity levels of manual wheelchair users. J Rehabil Res Dev. 2007;44:561–71. - PubMed
-
- Sonenblum SE, Sprigle S, Harris FH, Maurer CL. Characterization of power wheelchair use in the home and community. Arch Phys Med Rehabil. 2008 Mar;89:486–91. - PubMed
-
- Harris F, Sprigle S, Sonenblum SE, Maurer CL. The participation and activity measurement system: an example application among people who use wheeled mobility devices. Disabil Rehabil Assist Technol. 2010 Jan;5:48–57. - PubMed
-
- Cooper RA, Thorman T, Cooper R, Dvorznak MJ, Fitzgerald SG, Ammer W, et al. Driving characteristics of electric-powered wheelchair users: how far, fast, and often do people drive? Arch Phys Med Rehabil. 2002 Feb;83:250–5. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources