

An experimental feasibility study on robotic endonasal telesurgery
- PMID: 25599203
- PMCID: PMC4366329
- DOI: 10.1227/NEU.0000000000000623
An experimental feasibility study on robotic endonasal telesurgery
Abstract
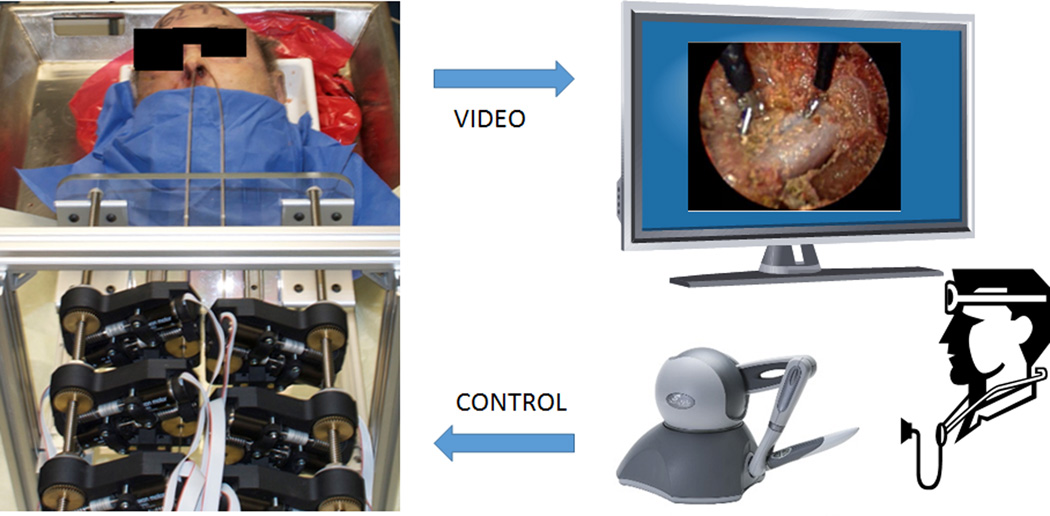
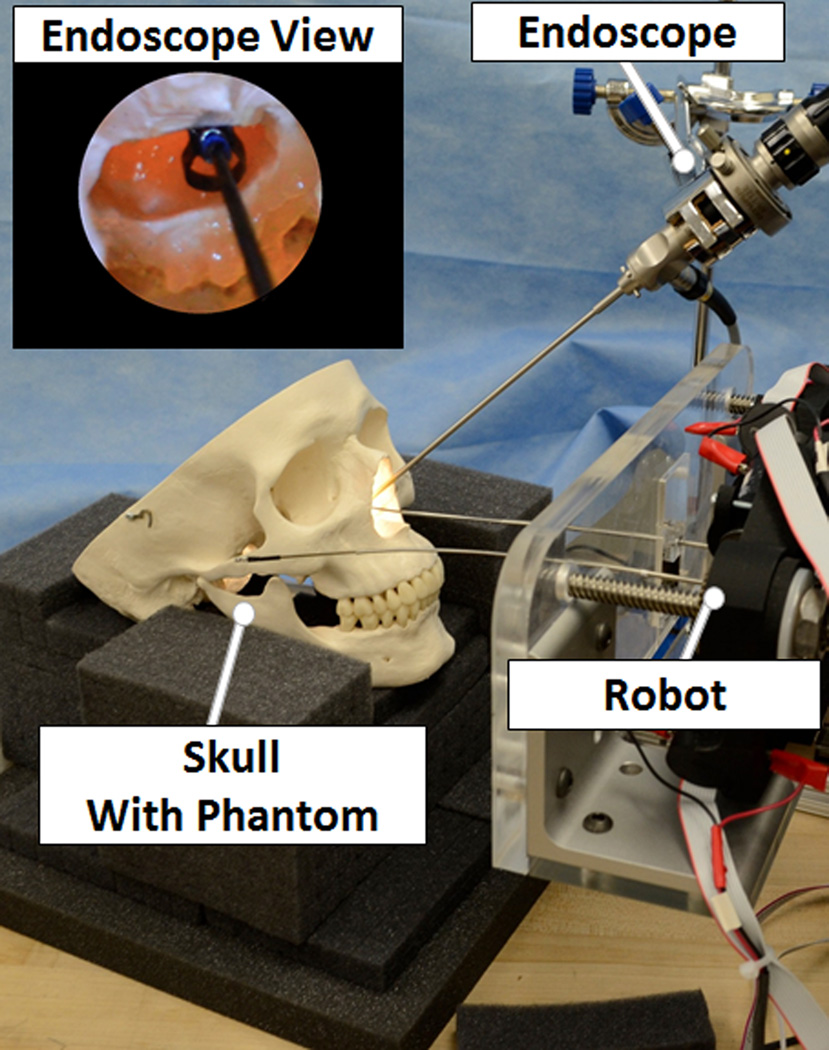
Background: Novel robots have recently been developed specifically for endonasal surgery. They can deliver several thin, tentacle-like surgical instruments through a single nostril. Among the many potential advantages of such a robotic system is the prospect of telesurgery over long distances.
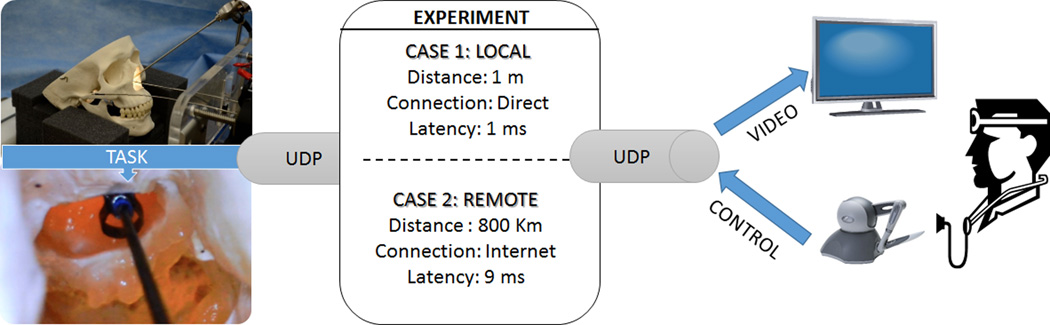
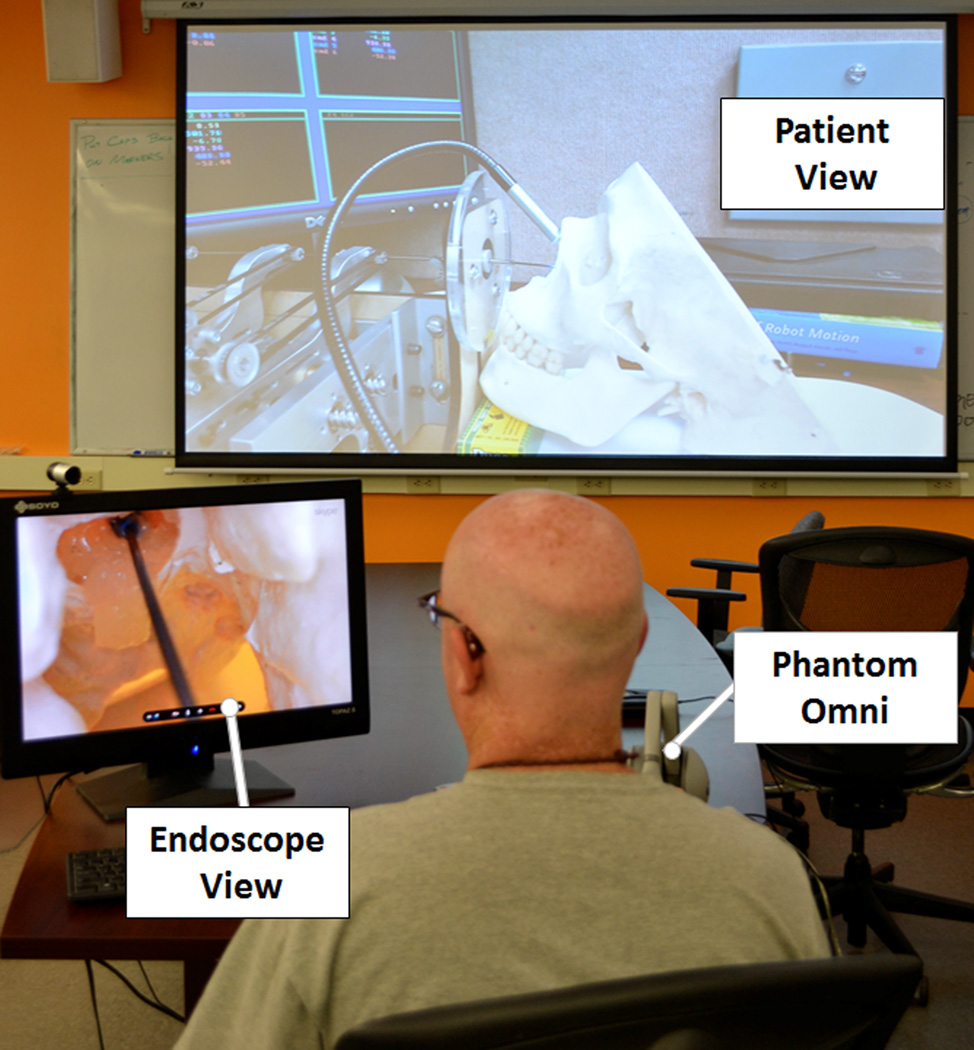
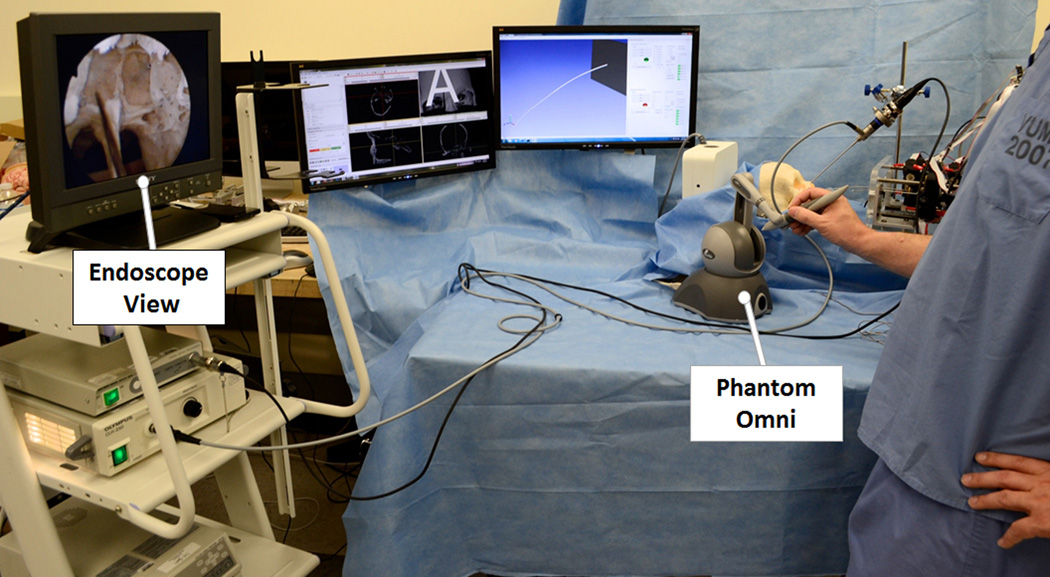
Objective: To describe a phantom pituitary tumor removal done by a surgeon in Nashville, Tennessee, controlling a robot located approximately 800 km away in Chapel Hill, North Carolina, the first remote telesurgery experiment involving tentacle-like concentric tube manipulators.
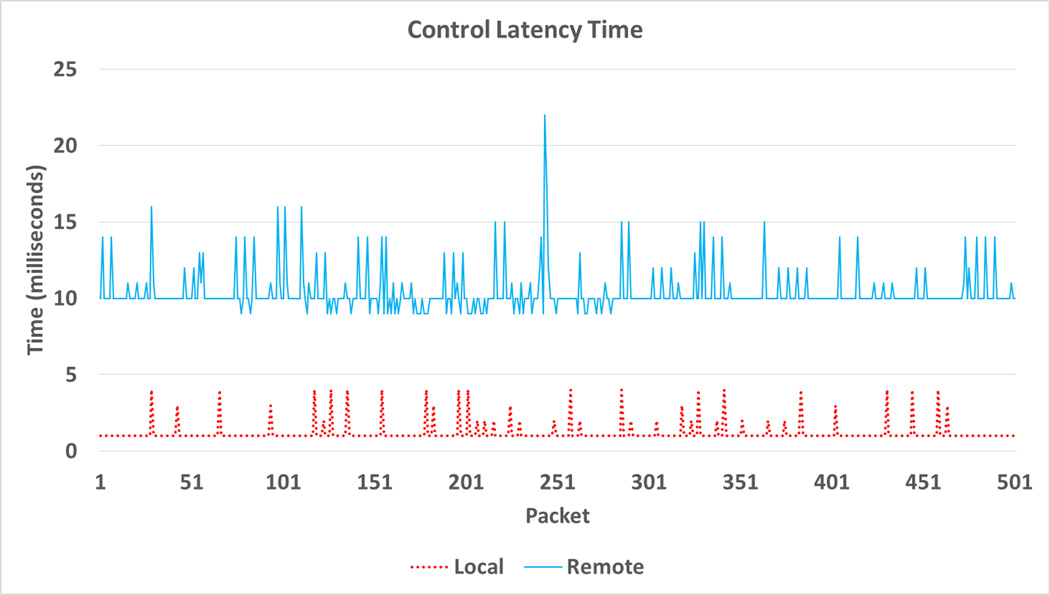
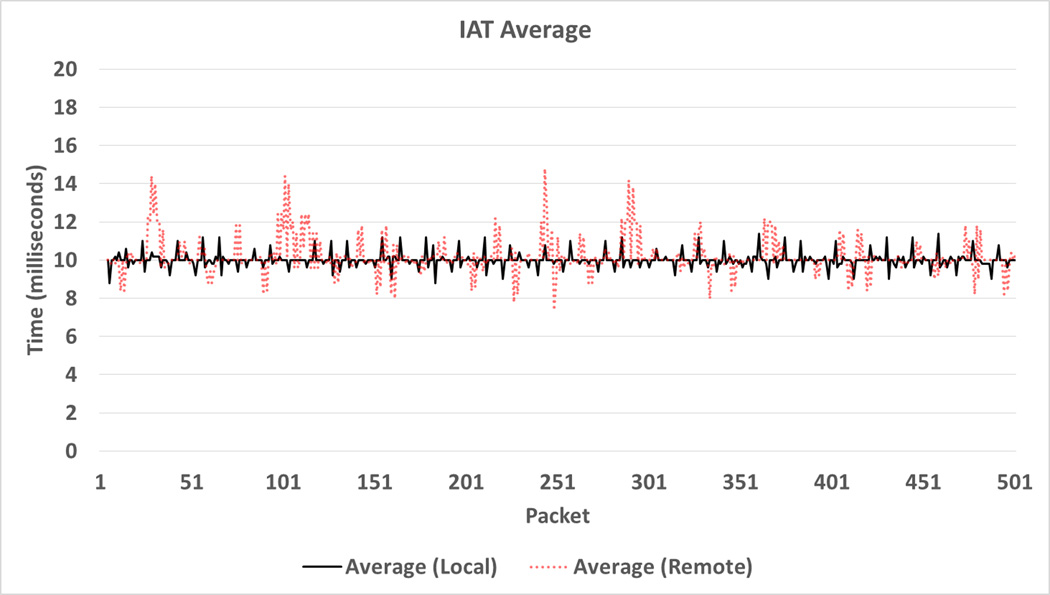
Methods: A phantom pituitary tumor removal experiment was conducted twice, once locally and once remotely, with the robotic system. Robot commands and video were transmitted across the Internet. The latency of the system was evaluated quantitatively in both local and remote cases to determine the effect of the 800-km distance between the surgeon and robot.
Results: We measured a control and video latency of < 100 milliseconds in the remote case. Qualitatively, the surgeon was able to carry out the experiment easily and observed no discernable difference between the remote and local cases.
Conclusion: Telesurgery over long distances is feasible with this robotic system. In the longer term, this may enable expert skull base surgeons to help many more patients by performing surgeries remotely over long distances.
Figures

References
-
- Madhani AJ, Niemeyer G, Salisbury JK. Proceedings. 1998 IEEE/RSJ International Conference on Intelligent Robots and Systems. Innovations in Theory, Practice and Applications (Cat. No.98CH36190) Vol. 2. IEEE; 1998. The Black Falcon: a teleoperated surgical instrument for minimally invasive surgery; pp. 936–944.
-
- Marescaux J, Leroy J, Gagner M, et al. Transatlantic robot-assisted telesurgery. Nature. 2001;413(6854):379–380. - PubMed
-
- Arata J, Takahashi H, Pitakwatchara P, et al. Proceedings 2006 IEEE International Conference on Robotics and Automation, 2006. ICRA 2006. IEEE; 2006. A remote surgery experiment between Japan-Korea using the minimally invasive surgical system; pp. 257–262.
-
- Pappone C, Vicedomini G, Manguso F, et al. Robotic magnetic navigation for atrial fibrillation ablation. J Am Coll Cardiol. 2006;47(7):1390–1400. - PubMed
-
- Malik T. Deep Diving Team to Test Robotic Surgeons on Sea Floor. [Accessed December 6, 2014];2007 Available at: http://www.space.com/3771-deep-diving-team-test-robotic-surgeons-sea-flo....
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
