

Adaptive data filtering of inertial sensors with variable bandwidth
- PMID: 25648711
- PMCID: PMC4367359
- DOI: 10.3390/s150203282
Adaptive data filtering of inertial sensors with variable bandwidth
Abstract
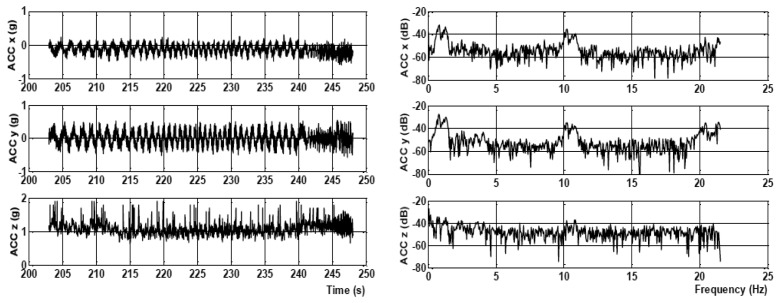
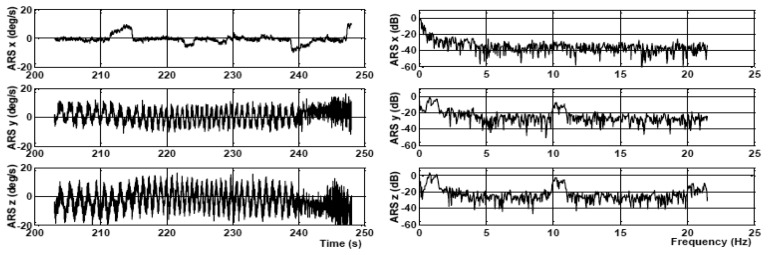
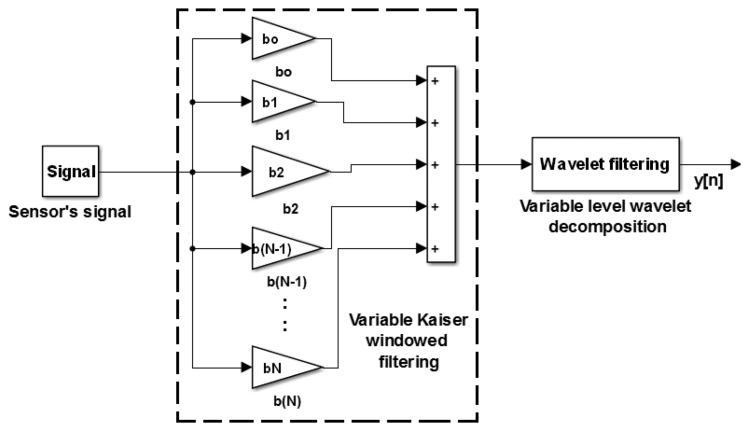
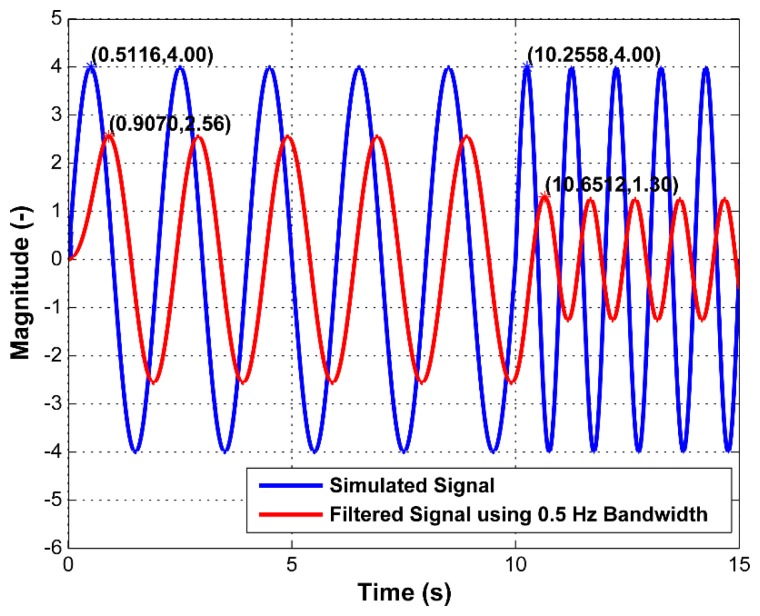
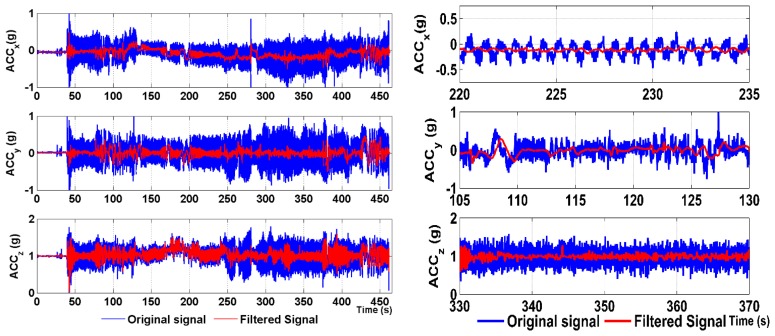
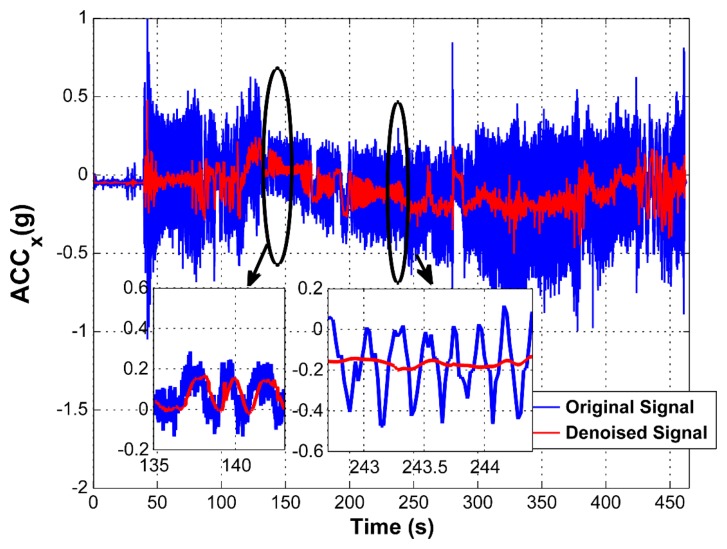
MEMS (micro-electro-mechanical system)-based inertial sensors, i.e., accelerometers and angular rate sensors, are commonly used as a cost-effective solution for the purposes of navigation in a broad spectrum of terrestrial and aerospace applications. These tri-axial inertial sensors form an inertial measurement unit (IMU), which is a core unit of navigation systems. Even if MEMS sensors have an advantage in their size, cost, weight and power consumption, they suffer from bias instability, noisy output and insufficient resolution. Furthermore, the sensor's behavior can be significantly affected by strong vibration when it operates in harsh environments. All of these constitute conditions require treatment through data processing. As long as the navigation solution is primarily based on using only inertial data, this paper proposes a novel concept in adaptive data pre-processing by using a variable bandwidth filtering. This approach utilizes sinusoidal estimation to continuously adapt the filtering bandwidth of the accelerometer's data in order to reduce the effects of vibration and sensor noise before attitude estimation is processed. Low frequency vibration generally limits the conditions under which the accelerometers can be used to aid the attitude estimation process, which is primarily based on angular rate data and, thus, decreases its accuracy. In contrast, the proposed pre-processing technique enables using accelerometers as an aiding source by effective data smoothing, even when they are affected by low frequency vibration. Verification of the proposed concept is performed on simulation and real-flight data obtained on an ultra-light aircraft. The results of both types of experiments confirm the suitability of the concept for inertial data pre-processing.
Figures

References
-
- Gebre-Egziabher D., Hayward R.C., Powell J.D. A low-cost GPS/inertial attitude heading reference system (AHRS) for general aviation applications. Proceedings of the IEEE 1998 Position Location and Navigation Symposium; Palm Springs, CA, USA. 20–23 April 1998.
-
- Savage P.G. Strapdown inertial navigation integration algorithm design part 1: Attitude algorithms. J. Guid. Control Dyn. 1998;21:19–28.
-
- Savage P.G. Strapdown inertial navigation integration algorithm design part 2: Velocity and position algorithms. J. Guid. Control Dyn. 1998;21:208–221.
-
- Sipos M., Paces P., Reinstein M., Rohac J. Flight attitude track reconstruction using two AHRS units under laboratory conditions. Proceedings of the 2009 IEEE Sensors; Christchurch, New Zealand. 25–28 October 2009.
-
- Euston M., Coote P., Mahony R., Jonghyuk K. A complementary filter for attitude estimation of a fixed-wing UAV. Proceedings of the International Conference on Intelligent Robots and Systems; Nice, France. 22–26 September 2008.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Research Materials
