

Effects of robotically modulating kinematic variability on motor skill learning and motivation
- PMID: 25673732
- PMCID: PMC4416588
- DOI: 10.1152/jn.00163.2014
Effects of robotically modulating kinematic variability on motor skill learning and motivation
Abstract
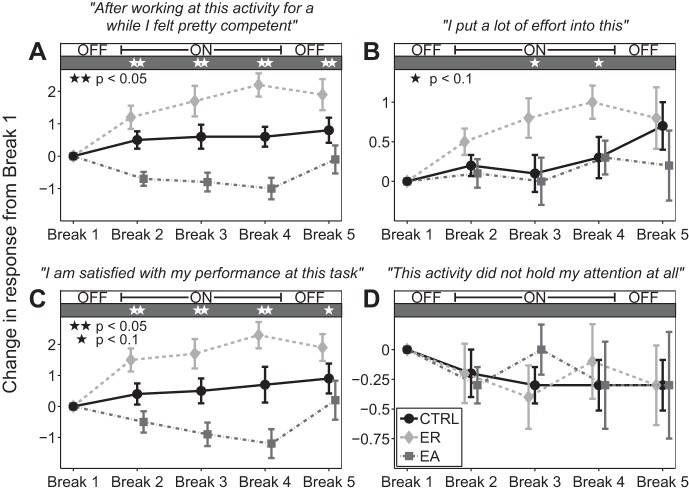
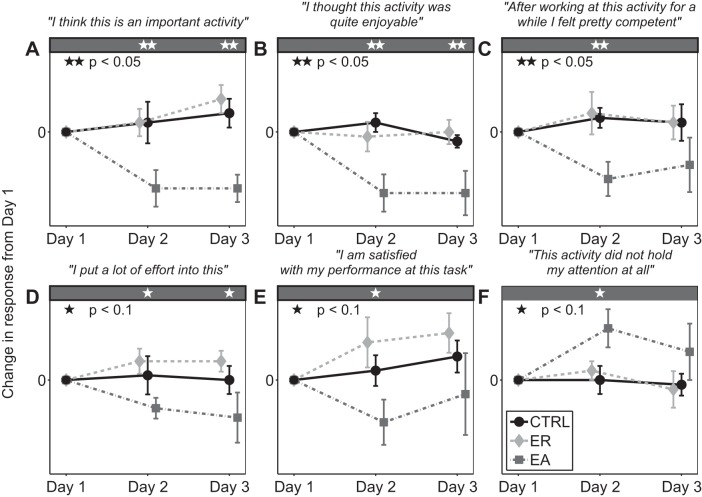
It is unclear how the variability of kinematic errors experienced during motor training affects skill retention and motivation. We used force fields produced by a haptic robot to modulate the kinematic errors of 30 healthy adults during a period of practice in a virtual simulation of golf putting. On day 1, participants became relatively skilled at putting to a near and far target by first practicing without force fields. On day 2, they warmed up at the task without force fields, then practiced with force fields that either reduced or augmented their kinematic errors and were finally assessed without the force fields active. On day 3, they returned for a long-term assessment, again without force fields. A control group practiced without force fields. We quantified motor skill as the variability in impact velocity at which participants putted the ball. We quantified motivation using a self-reported, standardized scale. Only individuals who were initially less skilled benefited from training; for these people, practicing with reduced kinematic variability improved skill more than practicing in the control condition. This reduced kinematic variability also improved self-reports of competence and satisfaction. Practice with increased kinematic variability worsened these self-reports as well as enjoyment. These negative motivational effects persisted on day 3 in a way that was uncorrelated with actual skill. In summary, robotically reducing kinematic errors in a golf putting training session improved putting skill more for less skilled putters. Robotically increasing kinematic errors had no performance effect, but decreased motivation in a persistent way.
Keywords: motivation; motor learning; motor skill; movement variability; robotic training.
Copyright © 2015 the American Physiological Society.
Figures






Similar articles
-
Effort, performance, and motivation: insights from robot-assisted training of human golf putting and rat grip strength.IEEE Int Conf Rehabil Robot. 2013 Jun;2013:6650461. doi: 10.1109/ICORR.2013.6650461. IEEE Int Conf Rehabil Robot. 2013. PMID: 24187278
-
Estimating Putting Outcomes in Golf: Experts Have a Better Sense of Distance.Percept Mot Skills. 2018 Apr;125(2):313-328. doi: 10.1177/0031512518754467. Epub 2018 Jan 22. Percept Mot Skills. 2018. PMID: 29357738
-
Reduced relative frequency of knowledge of results without visual feedback in learning a golf-putting task.Percept Mot Skills. 2008 Feb;106(1):225-33. doi: 10.2466/pms.106.1.225-233. Percept Mot Skills. 2008. PMID: 18459371
-
Movement variability in the golf swing.Sports Biomech. 2012 Jun;11(2):273-87. doi: 10.1080/14763141.2011.650187. Sports Biomech. 2012. PMID: 22900407 Review.
-
Skill acquisition interventions for the learning of sports-related skills: A scoping review of randomised controlled trials.Psychol Sport Exerc. 2024 May;72:102615. doi: 10.1016/j.psychsport.2024.102615. Epub 2024 Feb 23. Psychol Sport Exerc. 2024. PMID: 38401870
Cited by
-
Bayesian Estimation of Potential Performance Improvement Elicited by Robot-Guided Training.Front Neurosci. 2021 Oct 21;15:704402. doi: 10.3389/fnins.2021.704402. eCollection 2021. Front Neurosci. 2021. PMID: 34744603 Free PMC article.
-
The effectiveness of robotic training depends on motor task characteristics.Exp Brain Res. 2017 Dec;235(12):3799-3816. doi: 10.1007/s00221-017-5099-9. Epub 2017 Oct 5. Exp Brain Res. 2017. PMID: 28983676
-
Rowing Simulator Modulates Water Density to Foster Motor Learning.Front Robot AI. 2019 Aug 21;6:74. doi: 10.3389/frobt.2019.00074. eCollection 2019. Front Robot AI. 2019. PMID: 33501089 Free PMC article.
-
Intra- and Inter-subject Variability in EEG-Based Sensorimotor Brain Computer Interface: A Review.Front Comput Neurosci. 2020 Jan 21;13:87. doi: 10.3389/fncom.2019.00087. eCollection 2019. Front Comput Neurosci. 2020. PMID: 32038208 Free PMC article. Review.
-
Haptic Error Modulation Outperforms Visual Error Amplification When Learning a Modified Gait Pattern.Front Neurosci. 2019 Feb 19;13:61. doi: 10.3389/fnins.2019.00061. eCollection 2019. Front Neurosci. 2019. PMID: 30837824 Free PMC article.
References
-
- Avila LTG, Chiviacowsky S, Wulf G, Lewthwaite R. Positive social-comparative feedback enhances motor learning in children. Psychol Sport Exerc 13: 849–853, 2012.
-
- Badami R, VaezMousavi M, Wulf G, Namazizadeh M. Feedback after good versus poor trials affects intrinsic motivation. Res Q Exerc Sport 82: 360–364, 2011. - PubMed
-
- Bandura A. Self-efficacy: toward a unifying theory of behavioral change. Psychol Rev 84: 191–215, 1977. - PubMed
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources