

Optical assembly of bio-hybrid micro-robots
- PMID: 25681045
- PMCID: PMC4328111
- DOI: 10.1007/s10544-015-9933-1
Optical assembly of bio-hybrid micro-robots
Abstract
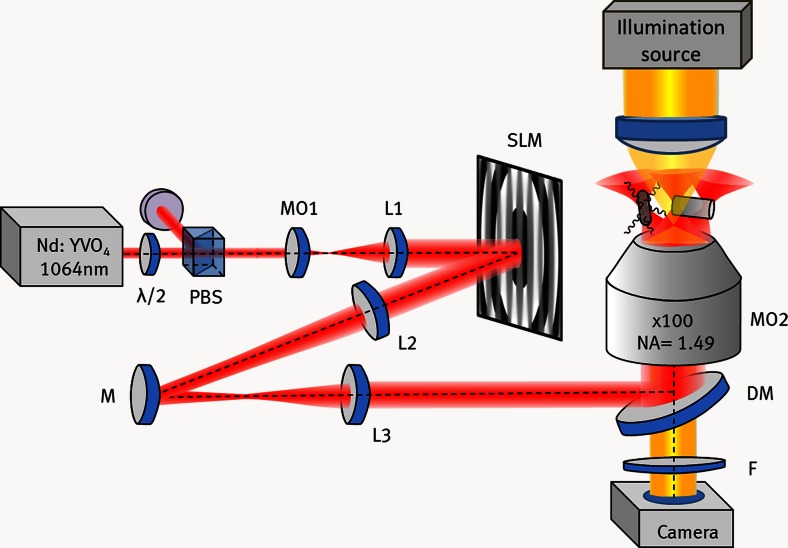
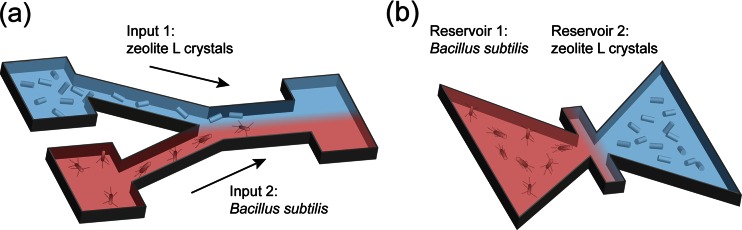
The combination of micro synthetic structures with bacterial flagella motors represents an actual trend for the construction of self-propelled micro-robots. The development of methods for fabrication of these bacteria-based robots is a first crucial step towards the realization of functional miniature and autonomous moving robots. We present a novel scheme based on optical trapping to fabricate living micro-robots. By using holographic optical tweezers that allow three-dimensional manipulation in real time, we are able to arrange the building blocks that constitute the micro-robot in a defined way. We demonstrate exemplarily that our method enables the controlled assembly of living micro-robots consisting of a rod-shaped prokaryotic bacterium and a single elongated zeolite L crystal, which are used as model of the biological and abiotic components, respectively. We present different proof-of-principle approaches for the site-selective attachment of the bacteria on the particle surface. The propulsion of the optically assembled micro-robot demonstrates the potential of the proposed method as a powerful strategy for the fabrication of bio-hybrid micro-robots.
Figures



References
Publication types
MeSH terms
Substances
LinkOut - more resources
Full Text Sources
Other Literature Sources
