

The effect of force feedback delay on stiffness perception and grip force modulation during tool-mediated interaction with elastic force fields
- PMID: 25717155
- PMCID: PMC4455557
- DOI: 10.1152/jn.00229.2014
The effect of force feedback delay on stiffness perception and grip force modulation during tool-mediated interaction with elastic force fields
Abstract
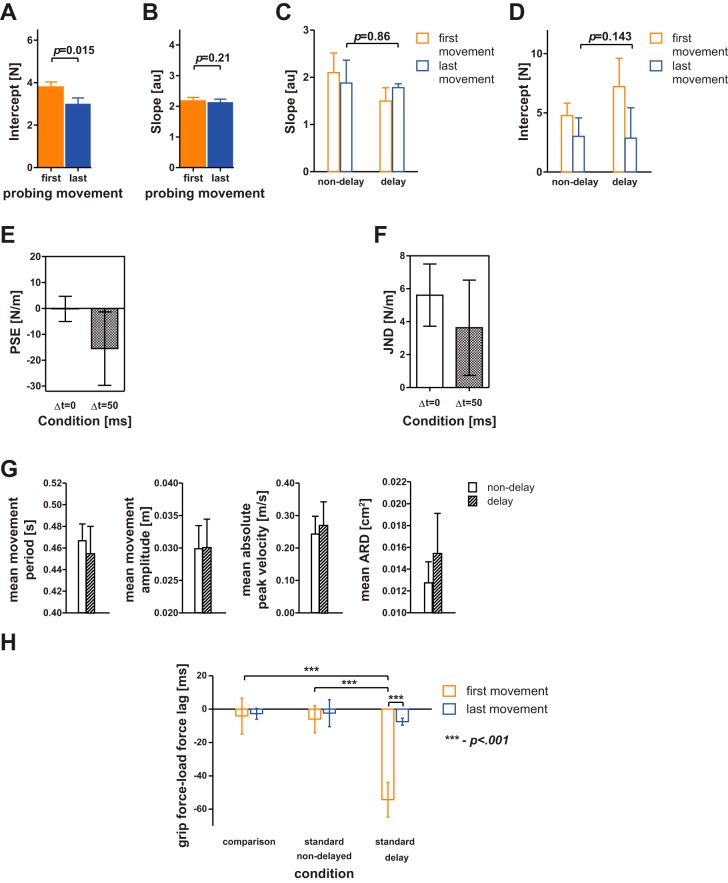
During interaction with objects, we form an internal representation of their mechanical properties. This representation is used for perception and for guiding actions, such as in precision grip, where grip force is modulated with the predicted load forces. In this study, we explored the relationship between grip force adjustment and perception of stiffness during interaction with linear elastic force fields. In a forced-choice paradigm, participants probed pairs of virtual force fields while grasping a force sensor that was attached to a haptic device. For each pair, they were asked which field had higher level of stiffness. In half of the pairs, the force feedback of one of the fields was delayed. Participants underestimated the stiffness of the delayed field relatively to the nondelayed, but their grip force characteristics were similar in both conditions. We analyzed the magnitude of the grip force and the lag between the grip force and the load force in the exploratory probing movements within each trial. Right before answering which force field had higher level of stiffness, both magnitude and lag were similar between delayed and nondelayed force fields. These results suggest that an accurate internal representation of environment stiffness and time delay was used for adjusting the grip force. However, this representation did not help in eliminating the bias in stiffness perception. We argue that during performance of a perceptual task that is based on proprioceptive feedback, separate neural mechanisms are responsible for perception and action-related computations in the brain.
Keywords: delay; explorative palpation; grip force; internal representation; stiffness perception.
Copyright © 2015 the American Physiological Society.
Figures









References
-
- Aglioti S, DeSouza JF, Goodale MA. Size-contrast illusions deceive the eye but not the hand. Curr Biol 5: 679–685, 1995. - PubMed
-
- Blakemore S, Frith C, Wolpert D. The cerebellum is involved in predicting the sensory consequences of action. Neuroreport 12: 1879–1884, 2001. - PubMed
-
- Bringoux L, Lepecq JC, Danion F. Does visually induced self-motion affect grip force when holding an object? J Neurophysiol 108: 1685–1694, 2012. - PubMed
-
- Bruno N. When does action resist visual illusions? Trends Cogn Sci 5: 379–382, 2001. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources