

Subject-specific body segment parameter estimation using 3D photogrammetry with multiple cameras
- PMID: 25780778
- PMCID: PMC4359122
- DOI: 10.7717/peerj.831
Subject-specific body segment parameter estimation using 3D photogrammetry with multiple cameras
Abstract
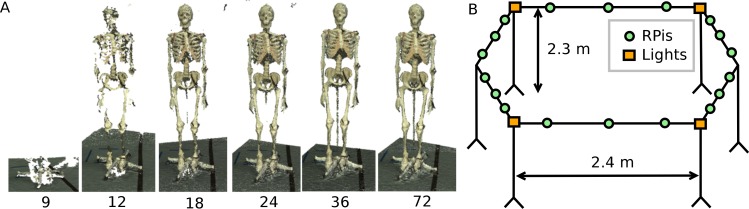
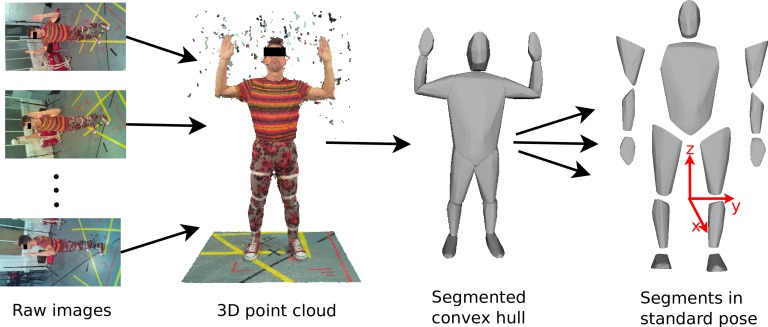
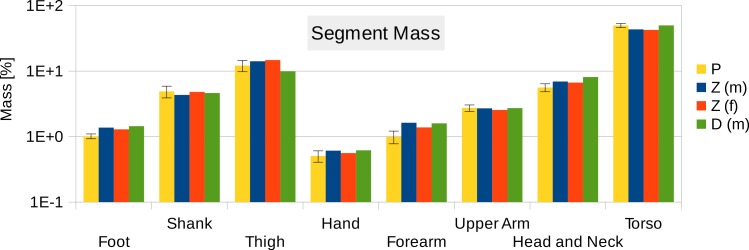
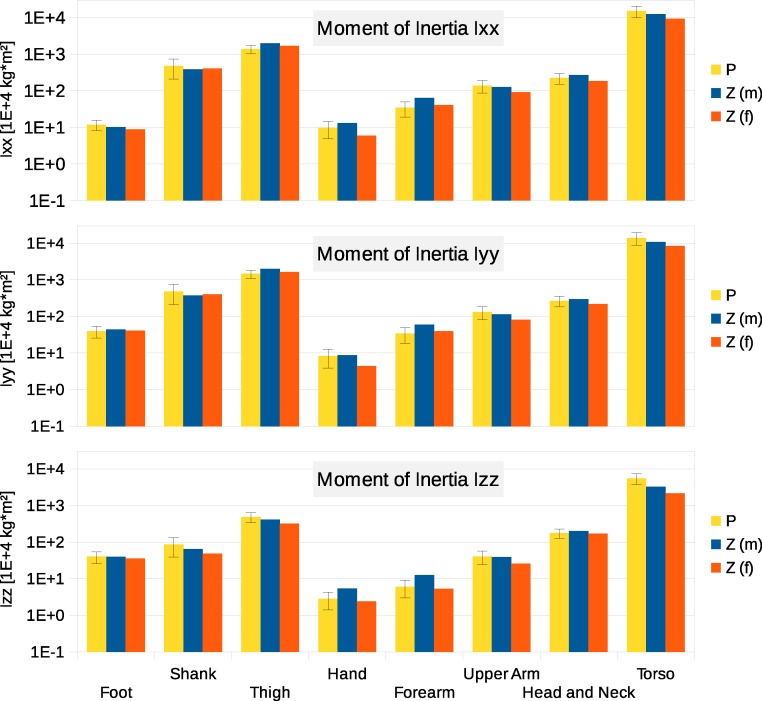
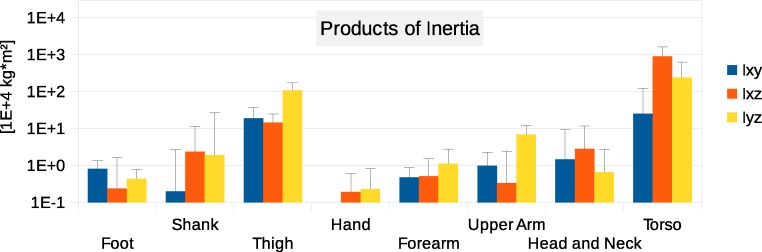
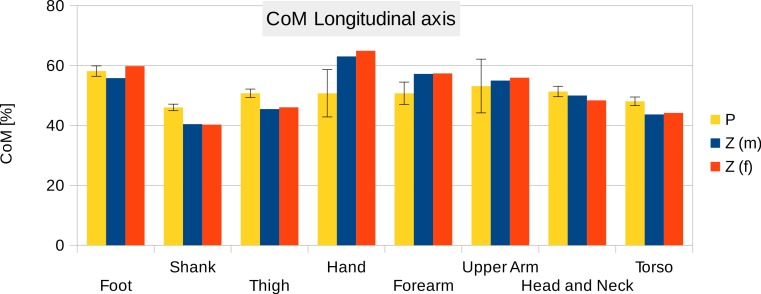
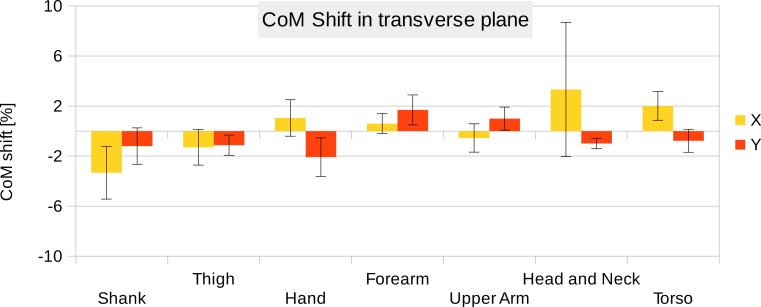
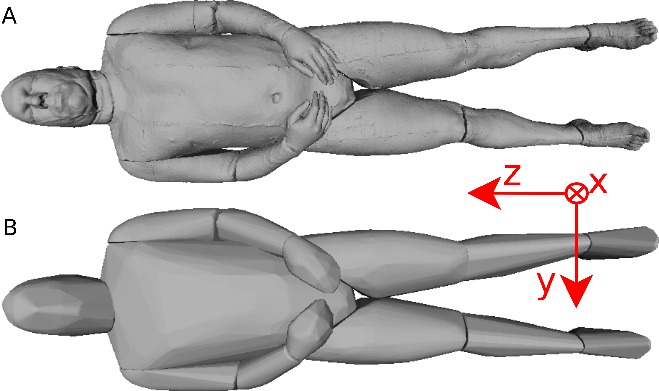
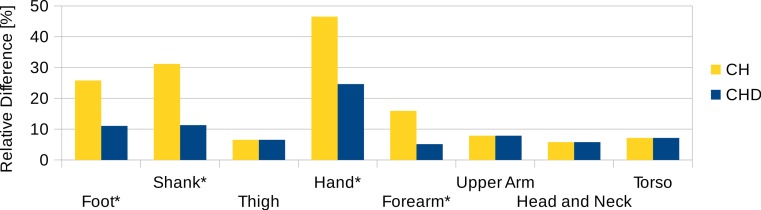
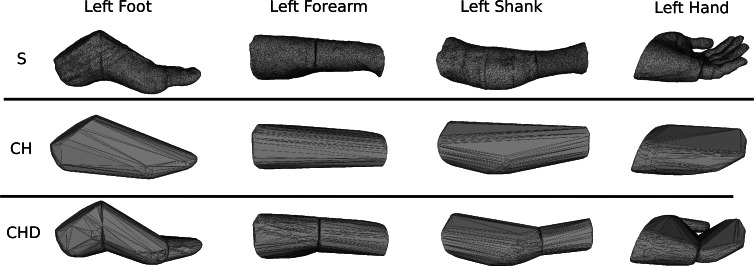
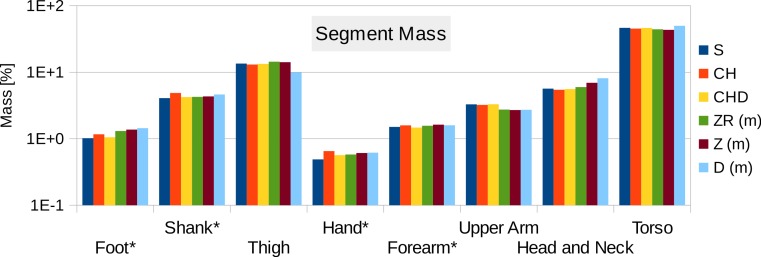
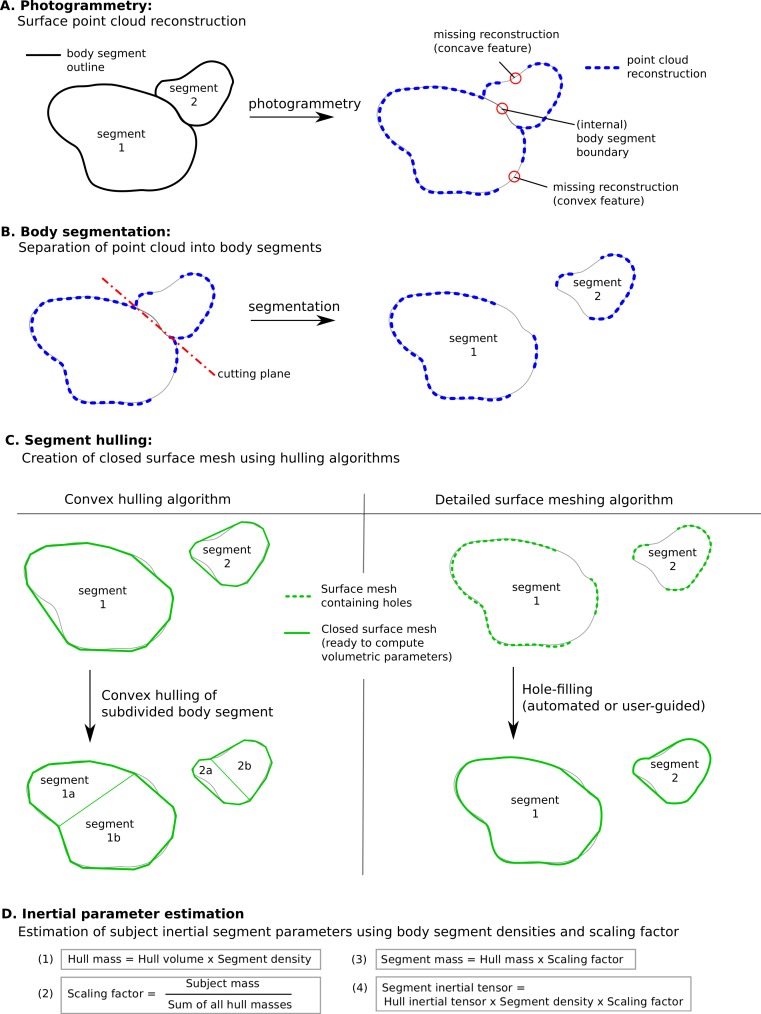
Inertial properties of body segments, such as mass, centre of mass or moments of inertia, are important parameters when studying movements of the human body. However, these quantities are not directly measurable. Current approaches include using regression models which have limited accuracy: geometric models with lengthy measuring procedures or acquiring and post-processing MRI scans of participants. We propose a geometric methodology based on 3D photogrammetry using multiple cameras to provide subject-specific body segment parameters while minimizing the interaction time with the participants. A low-cost body scanner was built using multiple cameras and 3D point cloud data generated using structure from motion photogrammetric reconstruction algorithms. The point cloud was manually separated into body segments, and convex hulling applied to each segment to produce the required geometric outlines. The accuracy of the method can be adjusted by choosing the number of subdivisions of the body segments. The body segment parameters of six participants (four male and two female) are presented using the proposed method. The multi-camera photogrammetric approach is expected to be particularly suited for studies including populations for which regression models are not available in literature and where other geometric techniques or MRI scanning are not applicable due to time or ethical constraints.
Keywords: Biomechanics; Body segment parameters; Geometric modelling; Photogrammetry; Structure from motion; Subject-specific estimation.
Conflict of interest statement
The authors declare there are no competing interests.
Figures
References
-
- Agarwal S, Snavely N, Simon I, Seitz SM, Szeliski R. Building Rome in a day. IEEE international conference on computer vision; Piscataway. 2009. pp. 72–79.
-
- Bates KT, Manning PL, Margetts L, Sellers WI. Sensitivity analysis in evolutionary robotic simulations of bipedal dinosaur running. Journal of Vertebrate Paleontology. 2010;30:458–466. doi: 10.1080/02724630903409329. - DOI
-
- Bernardini F, Mittleman J, Rushmeier H, Silva C, Taubin G. The ball-pivoting algorithm for surface reconstruction. IEEE Transactions on Visualization and Computer Graphics. 1999;5:349–359. doi: 10.1109/2945.817351. - DOI
-
- Bonnechère B, Jansen B, Salvia P, Bouzahouene H, Sholukha V, Cornelis J, Rooze M, Van Sint Jan S. Determination of the precision and accuracy of morphological measurements using the KinectTM sensor: comparison with standard stereophotogrammetry. Ergonomics. 2014;57:622–631. doi: 10.1080/00140139.2014.884246. - DOI - PubMed
LinkOut - more resources
Full Text Sources
Other Literature Sources
